Bracchium Roboticum Collaborativum Industriale Sex Axium ad Involucra


Bracchium Roboticum Collaborativum Industriale Sex Axium ad Involucra
Categoria Primaria
AGV AMR / elevatio cum elevatione AGV AMR / vehiculum automatice ductum AGV / robot mobilis autonomus AMR / currus AGV AMR ad tractationem materiarum industrialium / fabricator Sinensis robot AGV / horreum AMR / elevatio cum elevatione AMR cum elevatione laserica SLAM navigatio / robot mobilis AGV AMR / chassis lasericus AGV AMR navigatio SLAM / robot logisticus intelligens
Applicatio

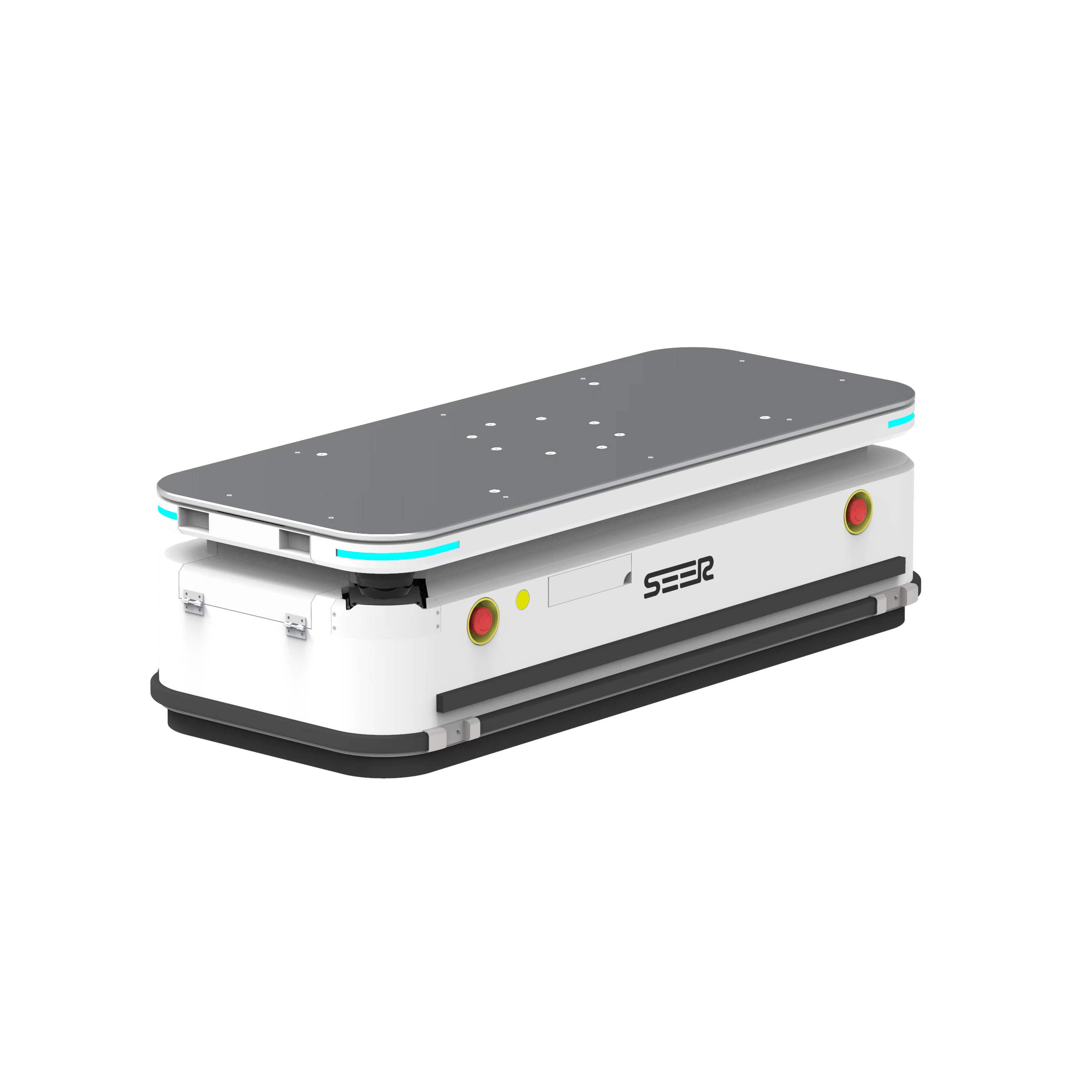
Series AMB Chassis Sine Homine (AMB, Auto Mobile Base) pro vehiculo agv autonomo, chassis universale pro vehiculis agv autonomis gubernatis designatum, nonnullas functiones praebet, ut editionem mapparum et navigationem localizationis. Hoc chassis sine homine pro curru agv interfaces copiosas, ut I/O et CAN, praebet ad varia modula superiora figenda una cum programmate clienti potenti et systematibus dispaccionis, ut usores celeriter fabricationem et applicationem vehiculorum agv autonomorum perficere adiuvent. Quattuor foramina adfigendi in summo chassis sine homine seriei AMB pro vehiculis agv autonomis gubernatis sunt, quae expansionem arbitrariam cum elevationibus, cylindris, manipulatoribus, tractione latenti, ostensione, etc. sustinent ad applicationes multiplices unius chassis consequendas. AMB una cum SEER Enterprise Enhanced Digitalization potest dispactionem et distributionem unificatam centenorum productorum AMB simul efficere, quod gradum intelligentem logisticae internae et translationis in officina magnopere emendat.
Characteristica
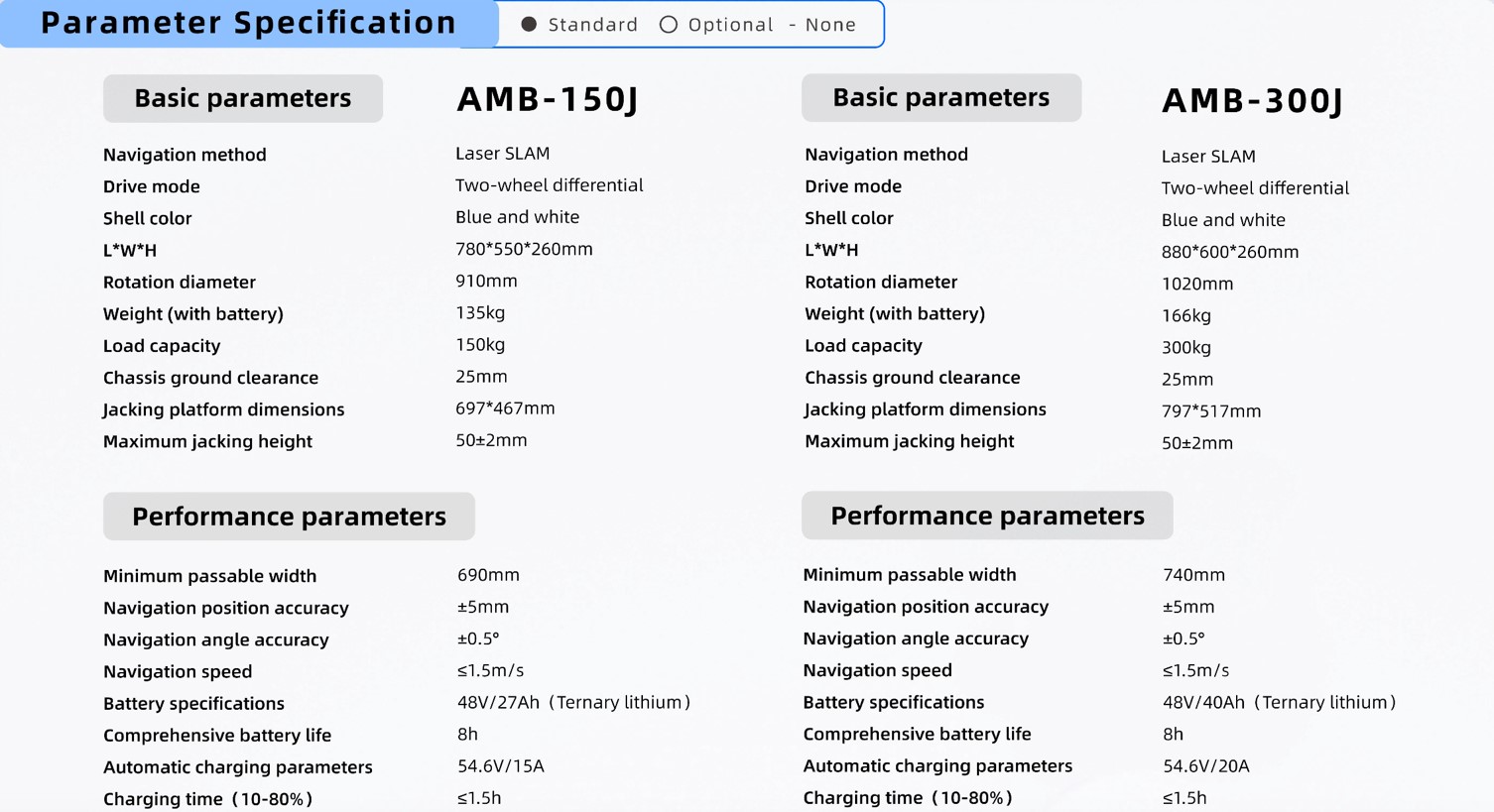
·Capacitas oneris: 150kg et 300kg
· Altitudo maxima elevationis: 50mm
· Praecisio positionis navigationis: ±5mm
· Praecisio anguli navigationis: ±0.5°
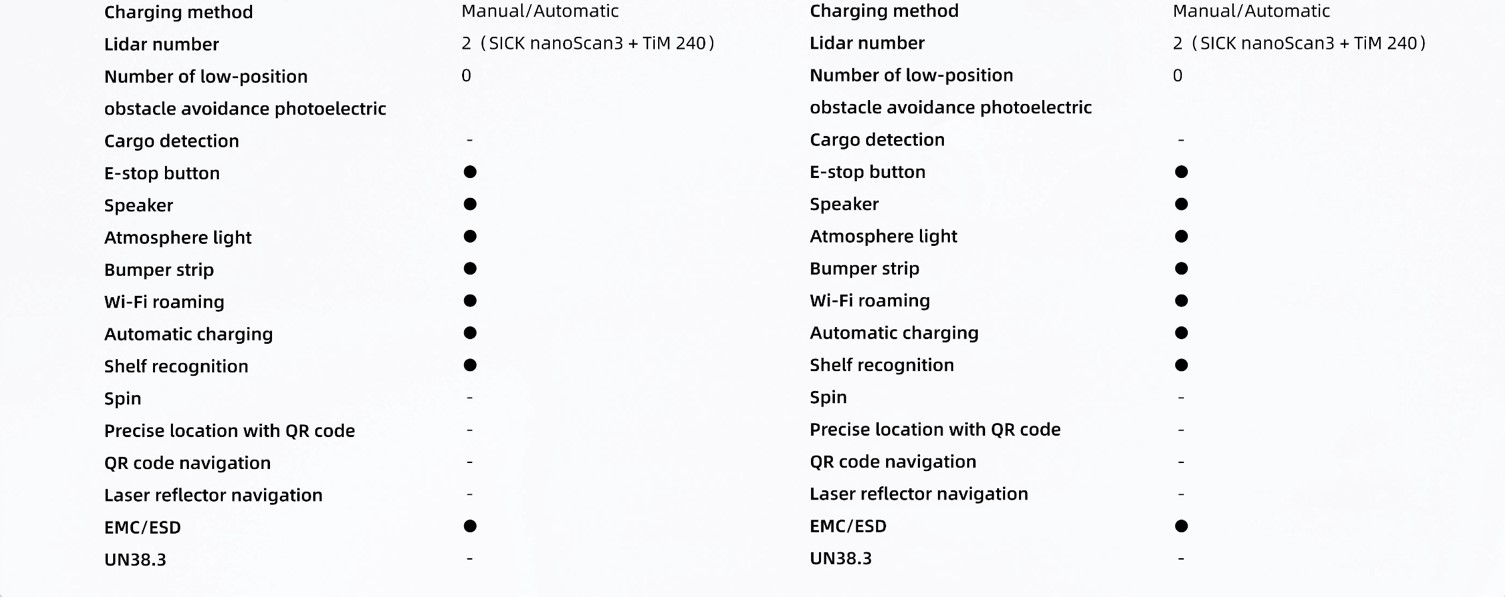
● Functiones locupletes omni tempore praesto sunt
Amplissimae et excellentes notae ordinariae necnon locupletes ac utiles proprietates provectae adiuvant clientes facile logisticas intelligentes consequi.
● Platae multispecificationis ad expansionem praesto sunt
Praebentur suggesta 150kg et 300kg ad requisita oneris et scaenae variarum industriarum implenda. Etiam adhiberi possunt cum manipulatoribus, cylindris, elevationibus, tractione latenti, pan/tilt, screen display, et cetera, ad multas applicationes uno chassis perficiendas.
● ±5 mm, efficax et accuratus
Algorithmus lasericus SLAM ad localizationem summae praecisionis efficiendam adhibetur, cum laseris repetitae localizationis accuratio intra ±5 mm sine reflexione, permittens coniunctionem continuam inter robotas mobiles et homines, et fluxum efficientem mercium inter varia puncta. Nota: Valores actuales a condicionibus ambientalibus pendent.
● Navigatio stabilis pro salute et fidelitate
Navigatio laserica SLAM, navigatio reflectori laserico, navigatio codicis QR, aliaeque rationes navigationis perfecte integratae et sine interruptione commutatae sunt ut stabilem operationem roboti mobilis curent.
● Facilis dispositio et administratio visibilis
Plena series programmatum adiuvantium et systematum digitalium facile operationem, ordinationem, et administrationem informationum robotarum mobilium perficere potest, et cum systemate MES fabricae sine intermissione coniungi potest ut logisticam intelligentem vere efficiat.
Producta Similia



Specificatio Parameter
Negotium Nostrum


Categoriae productorum
-

Lh1850-B-6 Machina Soldandi Sex Axium Automatica In...
-

1000kg Navigationis Laser Intelligentis Electricae Automatariae...
-

Bracchium Roboticum Sex Axium Bracchium Roboticum Industriale Roboticum A...
-
Machina Automataria Robotica Industrialis ad Soldandum Ar...
-

Bracchium Roboticum Industriale Sex Axium Szgh-I5 Collaborativum...
-
Compositio Pretii Vilis, Paletizatione, Politura, Spr...