Generator Vacui Pneumaticus Collaborativus Duorum Digitorum Mollium Prehensorum ad Automationem Robotarum



Generator Vacui Pneumaticus Collaborativus Duorum Digitorum Mollium Prehensorum ad Automationem Robotarum
Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio

Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.
Characteristica
·Magnus ictus
· Vis prehensionis et ictus adaptabiles
· Longa vita: decies centena milia cyclorum, ungues aereos superans
· Moderator inclusus: parva magnitudo, facilis integratio
·Imperium bus EIA485, I/O
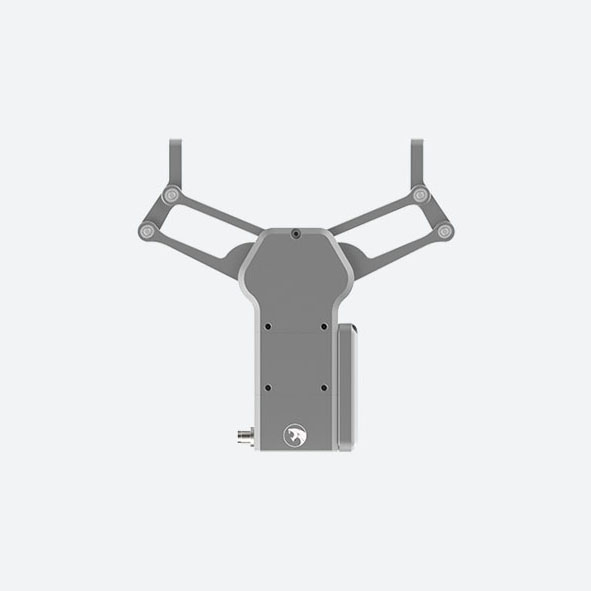
Vis Prehensionis: 40-130N, Forma Y Prehensoris Electrici cum Ictu 120mm
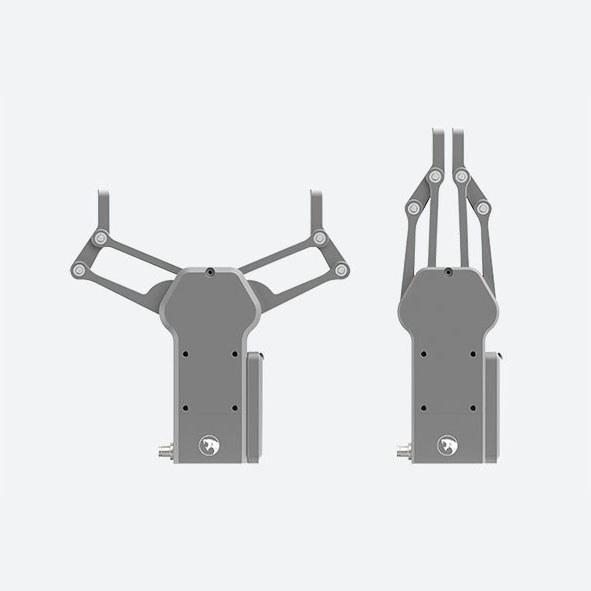
Ictus Longus
Ictus totalis: 120mm
Modus Moderationis
485 Modbus, EIA485, Moderatio Bus
Vis Prehensionis
Vis Prehensionis 40-130N Adaptabilis
Moderator Intra
Spatium parvum conveniens, facile integratur
Imperium Accurationis
Repetibilitas: ±0.02mm
Mollis Fixatio
Res fragiles et deformabiles prehendere potest

● Revolutionem in substitutione prensarum pneumaticarum prensis electricis promovens, prima prensa electrica cum systemate servo integrato in Sinis.
● Substitutio perfecta pro compressore aeris + filtro + valvula solenoidali + valvula suffocatoria + pinza pneumatica
● Vita utilis per plures cyclos, congruens cum cylindro Iaponico traditionali



Specificatio Parameter
| Numerus exemplaris Z-EFG-130 | Parametri |
| Summa ictus | 120mm |
| Vis prehensionis | 40-130N |
| Repetibilitas | ±0.02mm |
| Pondus prehensionis commendatum | Maximum 1kg |
| Transmissio modus | Cochlea nucis + nexus |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.9s |
| Ambitus temperaturae operativae | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80()Nulla pruina() |
| Modus motus | Nexus |
| Moderatio ictus | Adaptabilis |
| Adaptatio vis premendi | Adaptabilis |
| Pondus | 0.8kg |
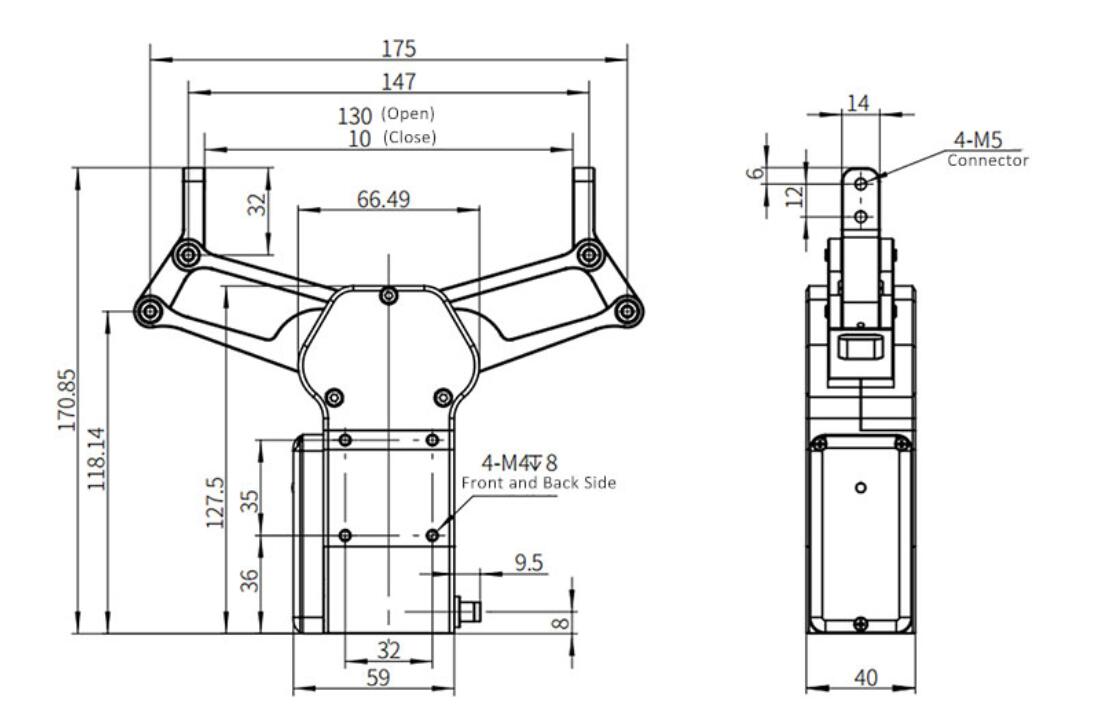
| Dimensiones()L*L*A() | 171*187*40mm (apertum) 218*66.5*40m (clausum) |
| Collocatio moderatoris | Incorporatus |
| Potestas | 10W |
| Typus motoris | DC sine spazzolis |
| Current Maximus | 2A |
| Tensio aestimata | 24V |
| Currens subsidiarius | 0.4A |
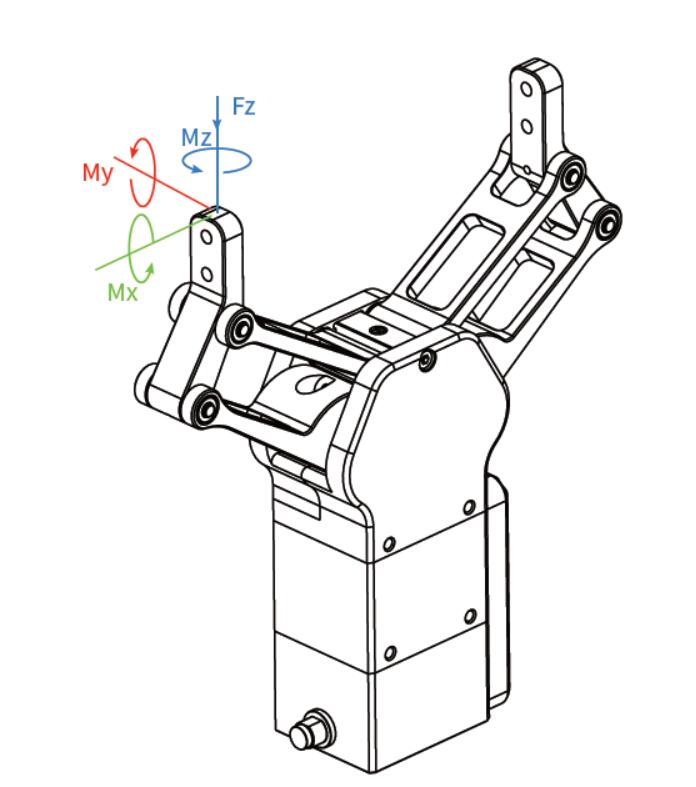
| Onus staticum permissum in directione verticali | |
| Ex: | 200N |
| Momentum torquens permissum | |
| Mx: | 2 Nm |
| Meum/Mea: | 2 Nm |
| Mz: | 2 Nm |
Plug and Play, Facile Integrare
Prehensor electricus Z-EFG-130 cum brachio robotico collaborativo congruere potest, et systema servo integratum intus habet; unus tantum prehensor compressori + filtro + valvulae solenoidis + valvulae suffocatoriae + prehensori aereo aequalis esse potest.


Longus Ictus, Magna Compatibilitas
Ictus efficax prehensoris electrici usque ad 120mm esse potest, magnitudo clausurae eius 10mm est, prehensor electricus adhiberi potest ad lamellas semiconductorias, electronicam 3C et alias industrias praecisionis, etc.
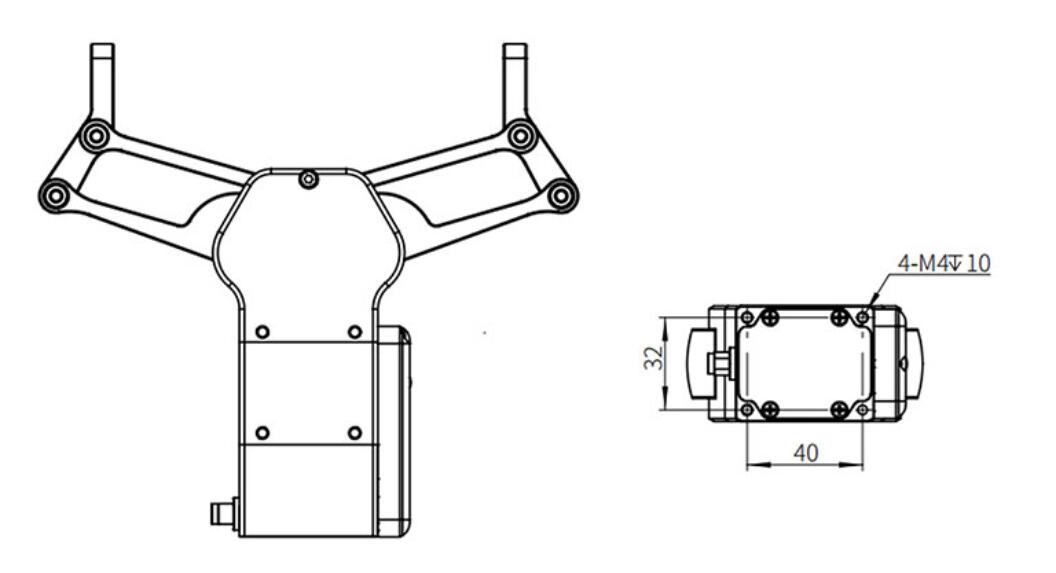
Parva Magnitudo, Commoda ad Integrandum

Magnitudo aperturae Z-EFG-130 est 171*187*40mm, magnitudo clausurae est 218*66.5*40mm; structura compacta est, multiplices installationis modos sustinet, moderator intus est, area parva tegitur.

Accuratio Vis Moderatio
Prehensor electricus designo transmissionis speciali et compensatione algorithmi impulsoris utitur; vis prehensionis 40-130N aptari potest, pondus prehensionis commendatur ≤1kg, et repetibilitatem ±0.02mm assequi potest.
Prehensio Adaptiva, Cauda Mutabilis

Prehensor electricus Z-EFG-130 prehensionem adaptivam sustinet; aptior est obiectis circularibus, sphaericis, vel formae specialis; partes caudae eius facile mutari possunt, et clientes obiecta pro necessitate sua prehendere possunt.


Modi Moderationis Multiplicati, Facile Operandum

Prehensor electricus per Modbus accurate regi potest, eius configuratio simplex est; ad protocollum communicationis Digital I/O utendum, uno tantum fune opus est ad coniunctionem cum ON/OFF, et cum systemate moderationis principali PLC compatibilis est.
Centrum Gravitatis Oneris Aberrans
Negotium Nostrum


Categoriae productorum
-

Pretio Competitivo Robot Industrialis 6 Axium Manipulator...
-

Industriae Celeris Ovorum Fructuum Deligendo et Ponendo 4...
-

Bracchium Roboticum Collaborativum Sex Axium Dobot Articulatum...
-

Bracchium Roboticum Longum Exercitus Telescopicum Manipulator 20...
-
Bracchium Roboticum Metallicum Sex Axium Mechanicale Venditatum Calidum...
-

Bracchium Roboticum Machinae Industrialis Manipulator 4 Axium...