Prehensor Roboticus Collaborativus – ISC Prehensor Brachii Cobot cum Fibula Molli Interna



Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis / Prehensor bracchii cobot / Prehensor mollis / Prehensor bracchii robotici
Applicatio

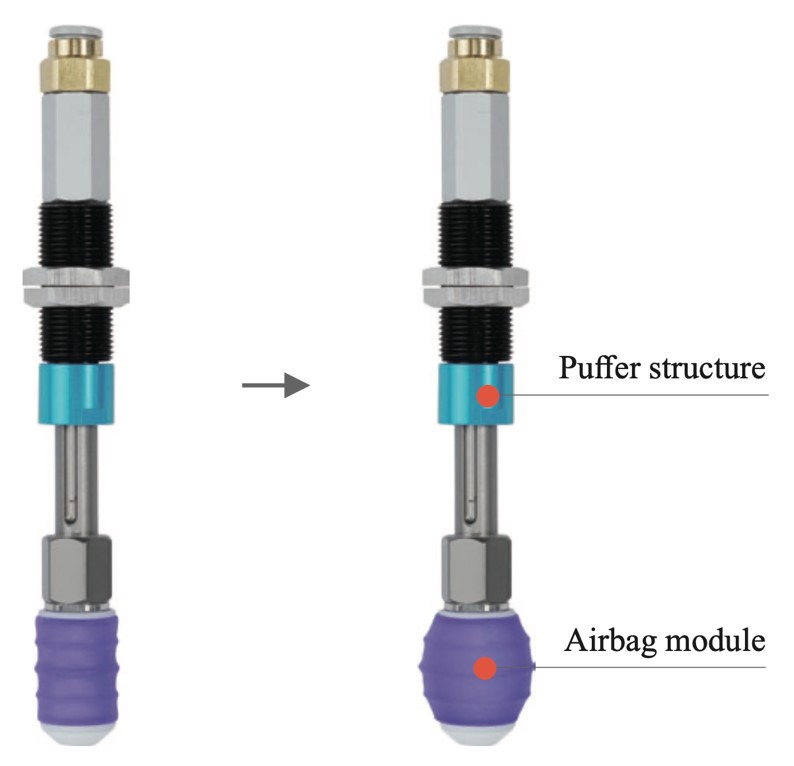
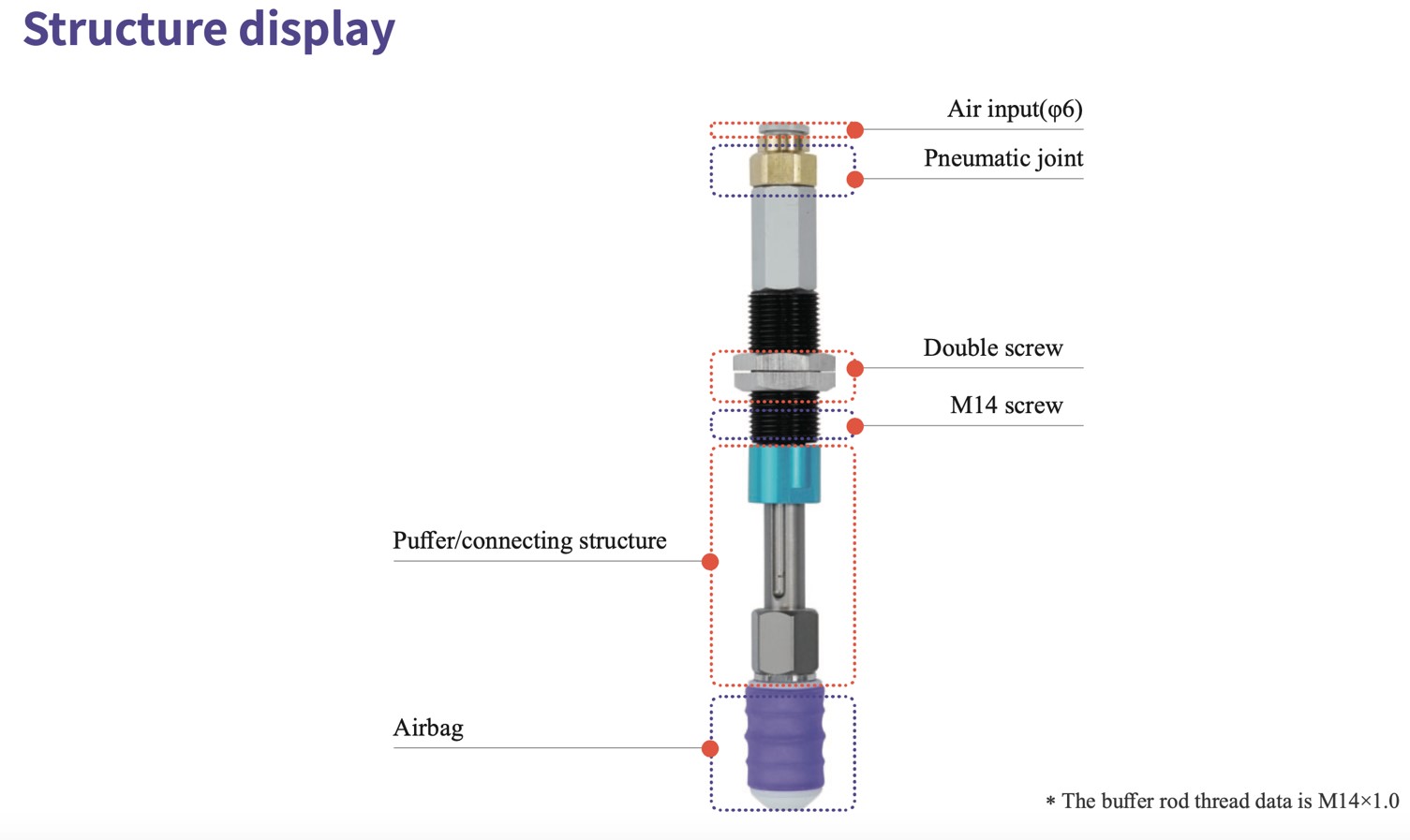
Fibula interna sustentationis ISC est instrumentum molle novum, cuius designum morphologiam autodefensionis piscium globulorum imitatur. Aere inflato pressione, instrumentum expandere et prehensionem internam sustentationis perficere potest.
Quia pars contactus cum materia laboranda molle est gummi siliconico, post pressionem additam, stratum "pulvinar aereum" inter rigidum sustentans et superficiem contactus erit, quod tensionem uniformem reddit et vix materiam laborandam laedet. Praeterea, pressio aerei ingressa aptari potest ad extensionem sacci aeris et contactum tensionis cum materia laboranda moderandum, ita mollitiem systematis prehensionis significanter augendam.
Characteristica

·Media Impellendi: aer purus
· Spatium Vitae Operis Standard: >100,000 vicibus
· Frequentia Operandi Maxima (cpm): 300
● Fibula interna sustentationis structuram specialem sacci aerii habet et deformationem varias una cum pressione interna producere potest.
● Pressio positiva inputata: Apparatus extenditur, se adaptans superficiem internam obiecti sustentans et prehensionem perficiens.
● Pressio negativa inputata: Apparatus statum naturalem praebet et obiecta liberat.
Prehensores molles SFG cum brachiis roboticis collaborativis summae classis adhibiti sunt, inter quos:

4-axis horizontalis (SCARA) robot Delta
Brachium roboti industrialis Nachi Fujikoshi
Robot quadriaxialis parallelus (Delta) ABB
Robot collaborativus sex axium UR
Robot collaborativus sex axium AUBO



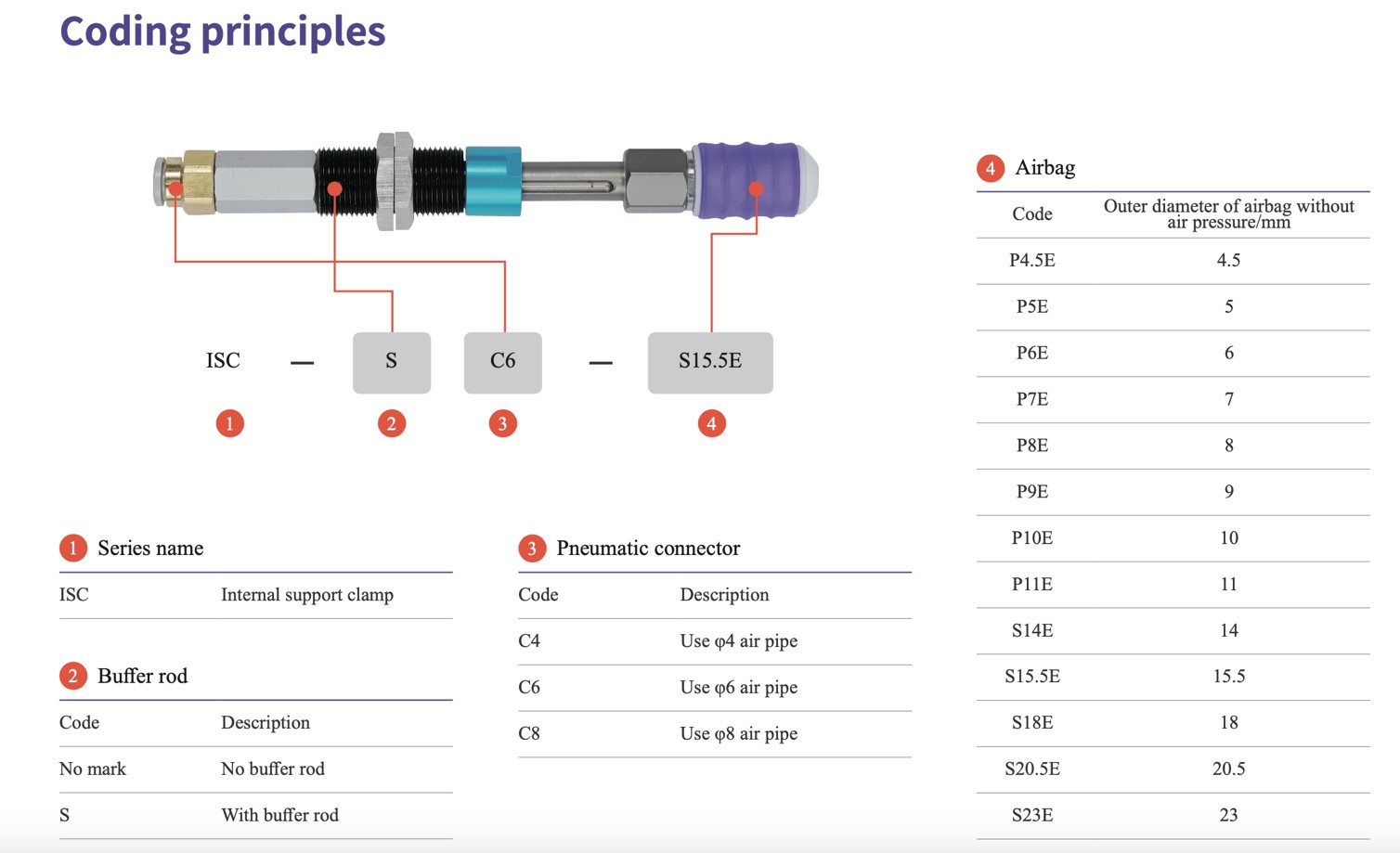
Specificatio Parameter
Fibula interna sustentationis aeris ISC est instrumentum molle novum, cuius designatio morphologiam autodefensionis piscis globosi imitatur. Aere inflato cum pressione, instrumentum expandere et prehensionem internam sustentationis perficere potest. Cum pressio aeris influxus accurate regi possit, vis prehensionis in instrumentum ad rem operandam regi potest, quo non facile laeditur res.
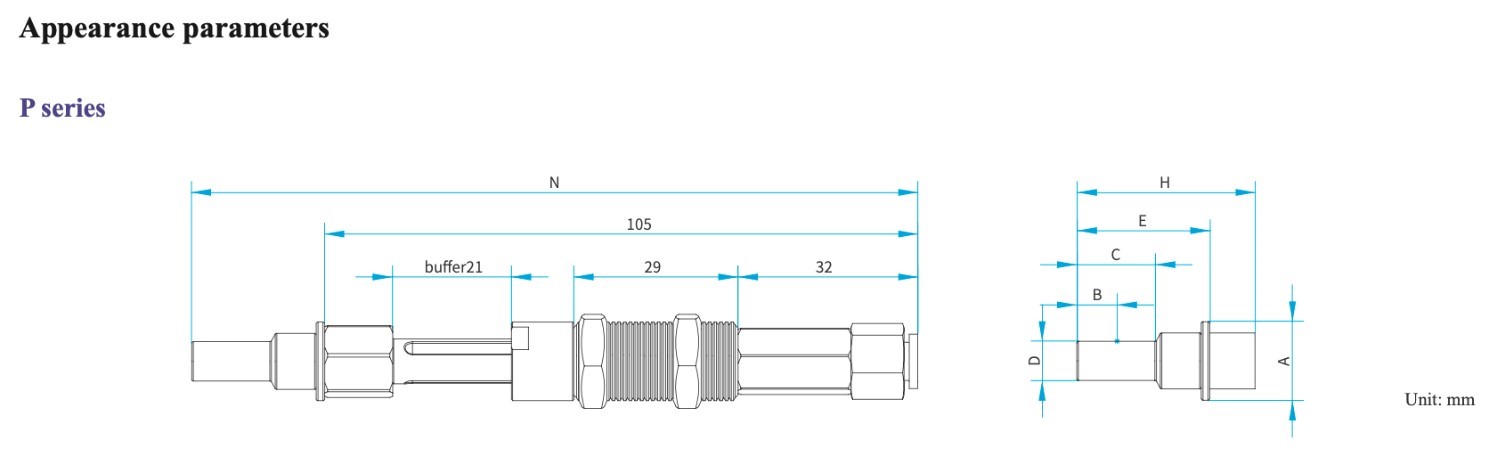
| Modellum | Altitudo totalis moduli sacci aeris H | Diameter superficiei contactus D | Diameter partis structuralis A | Altitudo a diametro operante ad fundum B | Altitudo superficiei contactus effectivae C | Altitudo operativa sacci aerii Modulus E | Longitudo totalis N |
| ISC-P4.5E | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | E+105 |
| ISC-P5E | 27.5 | 5 | 14 | 5 | 10 | 19.5 | E+105 |
| ISC-P6E | 30.5 | 6 | 14 | 6 | 12 | 22.5 | E+105 |
| ISC-P7E | 31.5 | 7 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P8E | 31.5 | 8 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P9E | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P10E | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P11E | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | E+105 |
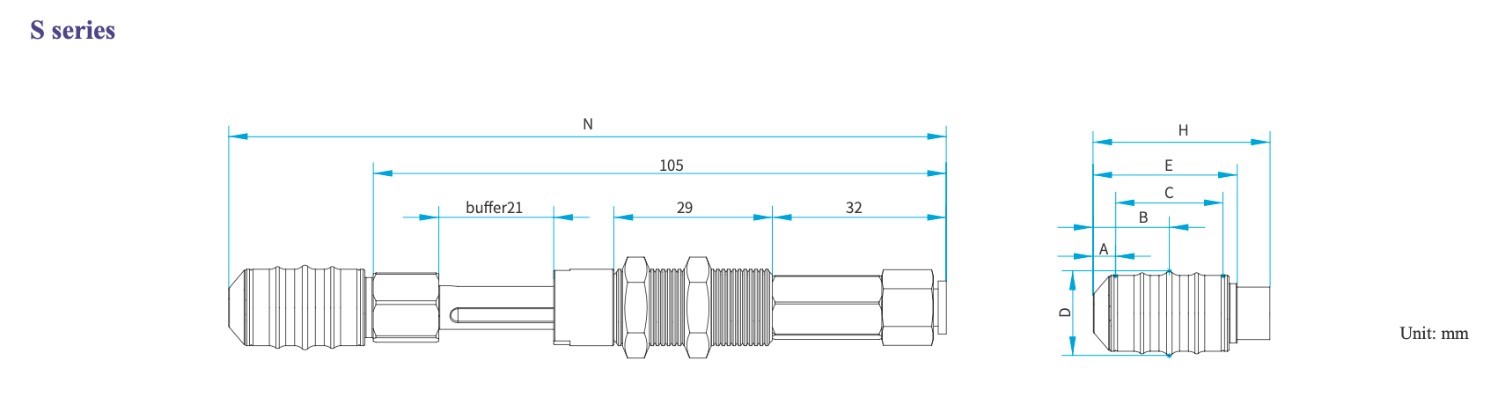
| Modellum | Altitudo totalis moduli sacci aeris H | Diameter superficiei contactus D | altitudo ducis A | Altitudo a diametro operante ad fundum B | Altitudo superficiei contactus effectivae C | Altitudo operativa sacci aerii Modulus E | Longitudo totalis N |
| ISC-S14E | 32.5 | 14 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S15.5E | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S18E | 40.5 | 18 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S20.5E | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S23E | 40.5 | 23 | 6 | 19 | 26 | 34.5 | E+105 |
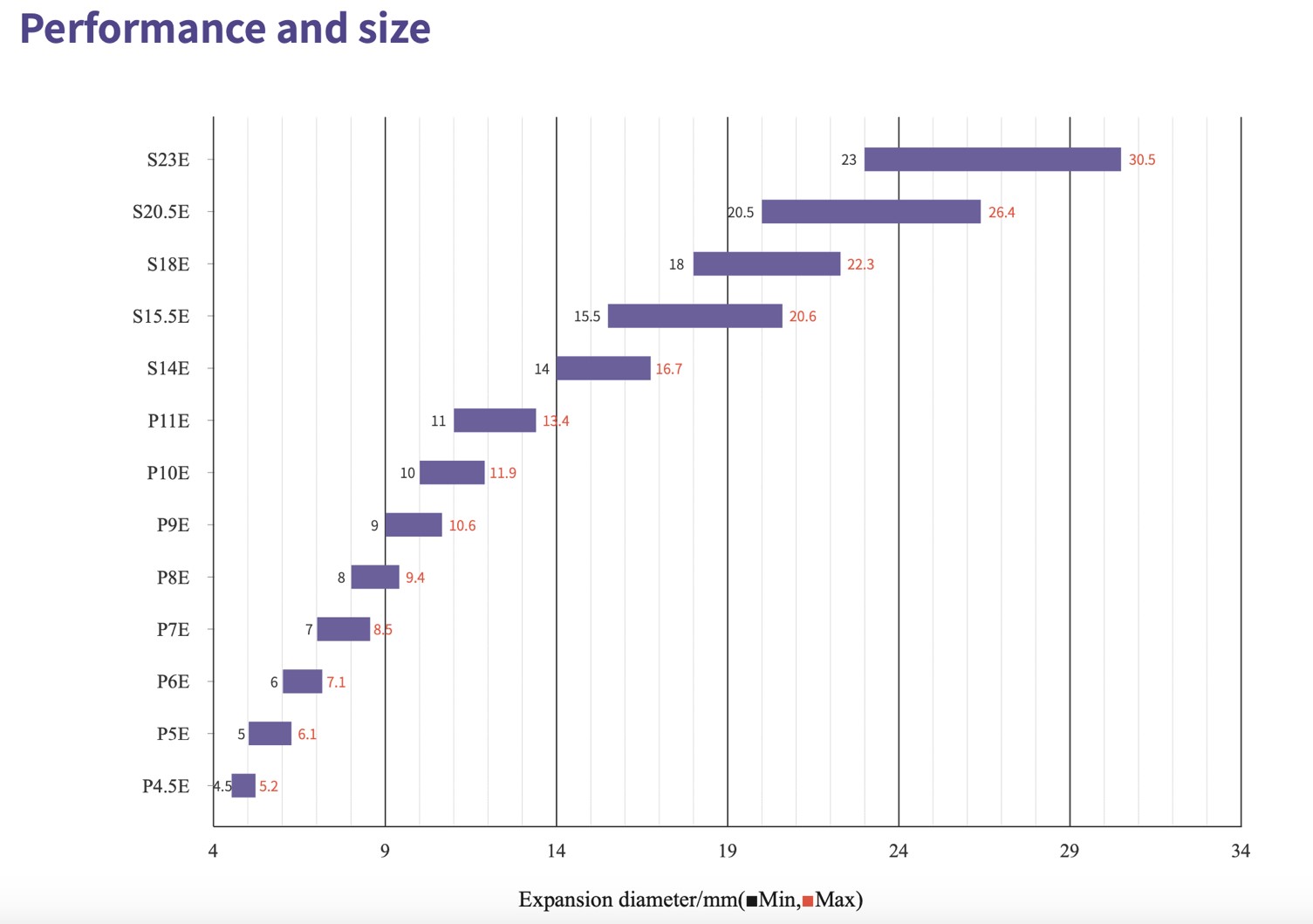
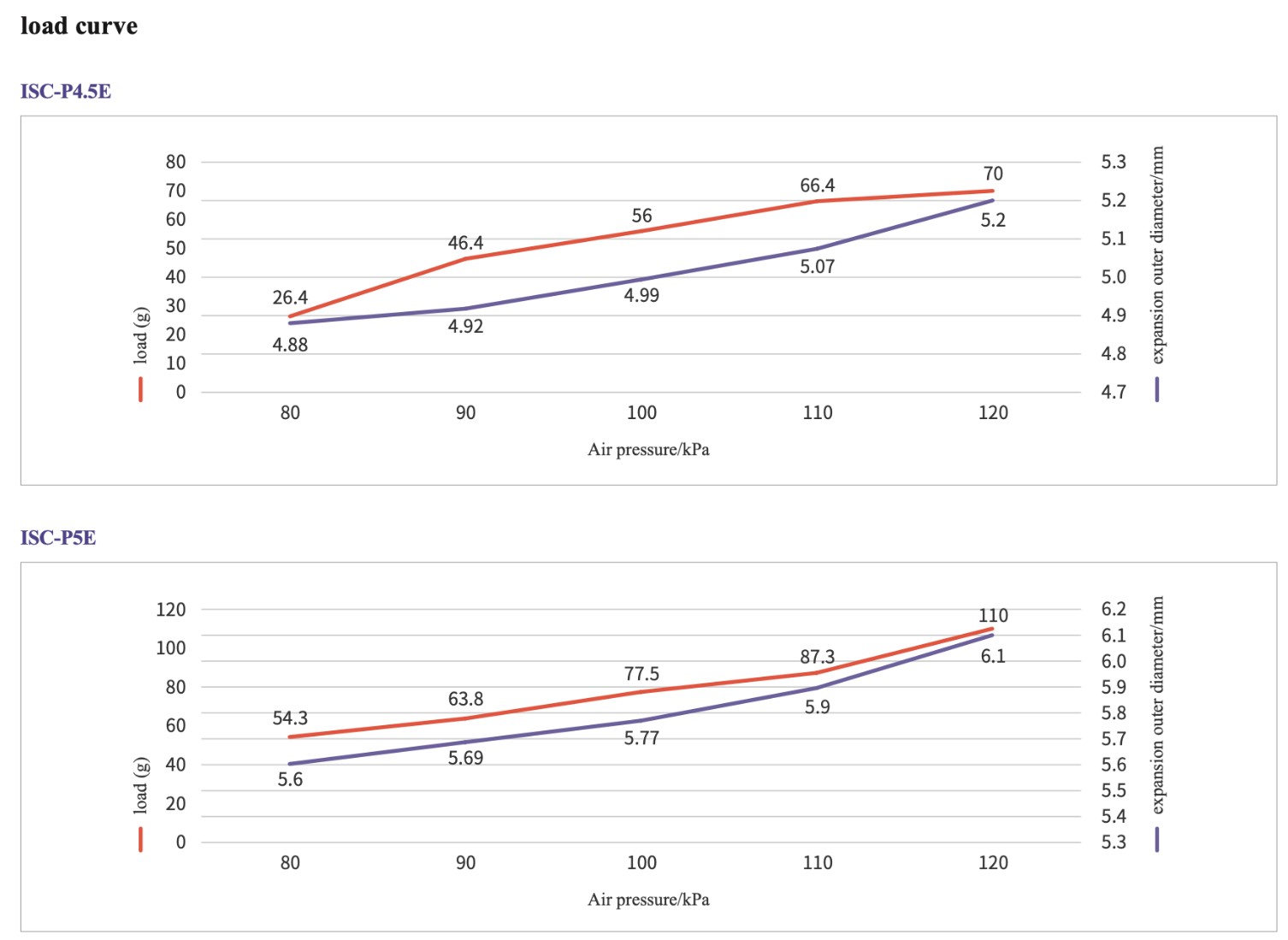
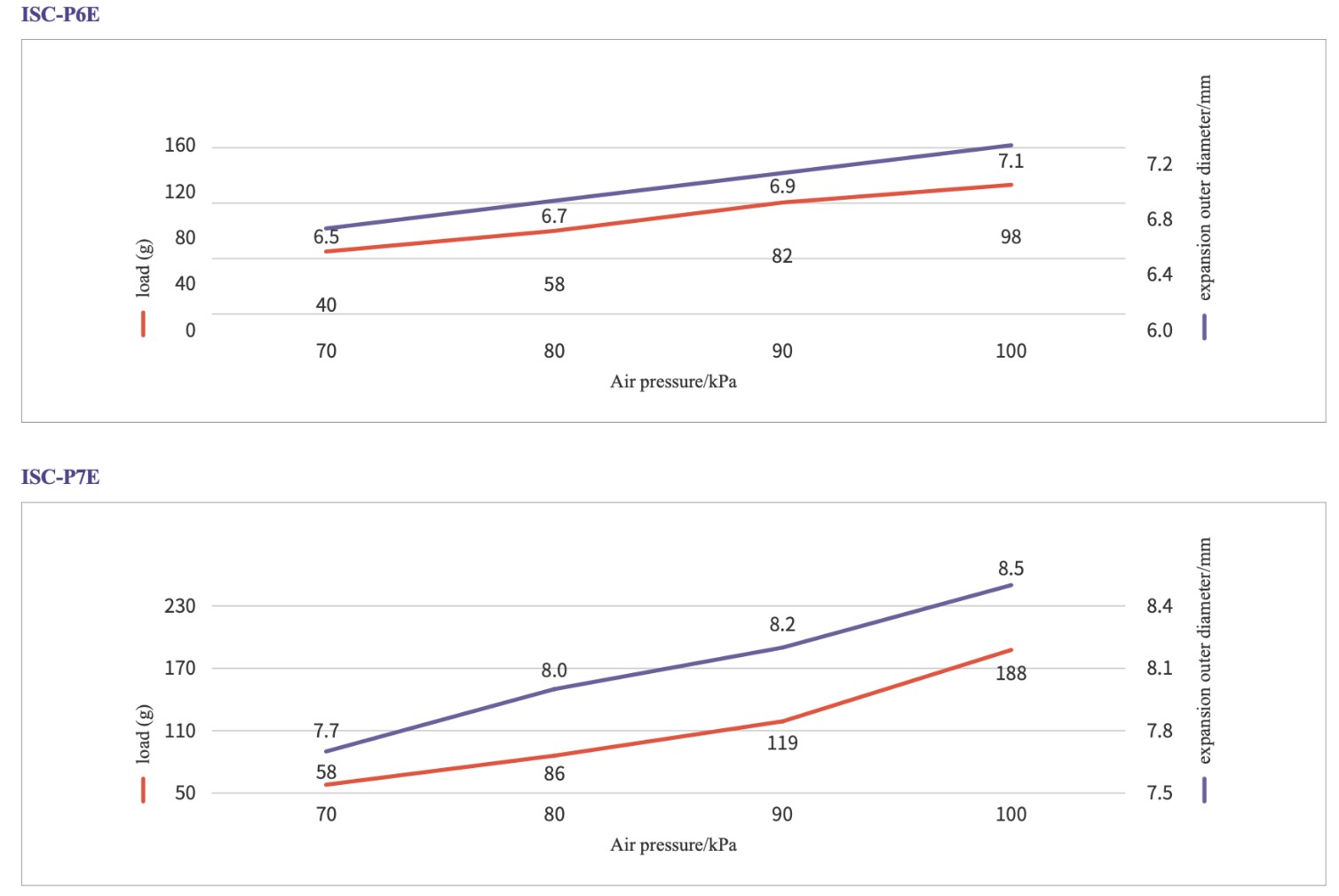
Diameter externus expansus
| Modellum | Ambitus pressionis operativae /kPa | Maxima expansio diameter externus/mm | Onus maximum/g | Pondus fixturae/g | Exemplar virgae metallicae | Dimensiones foraminis montandi/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0-100 | 8.5 | CLXXXVIII | 36 | VFNT 1421-G18 | 14.5 |
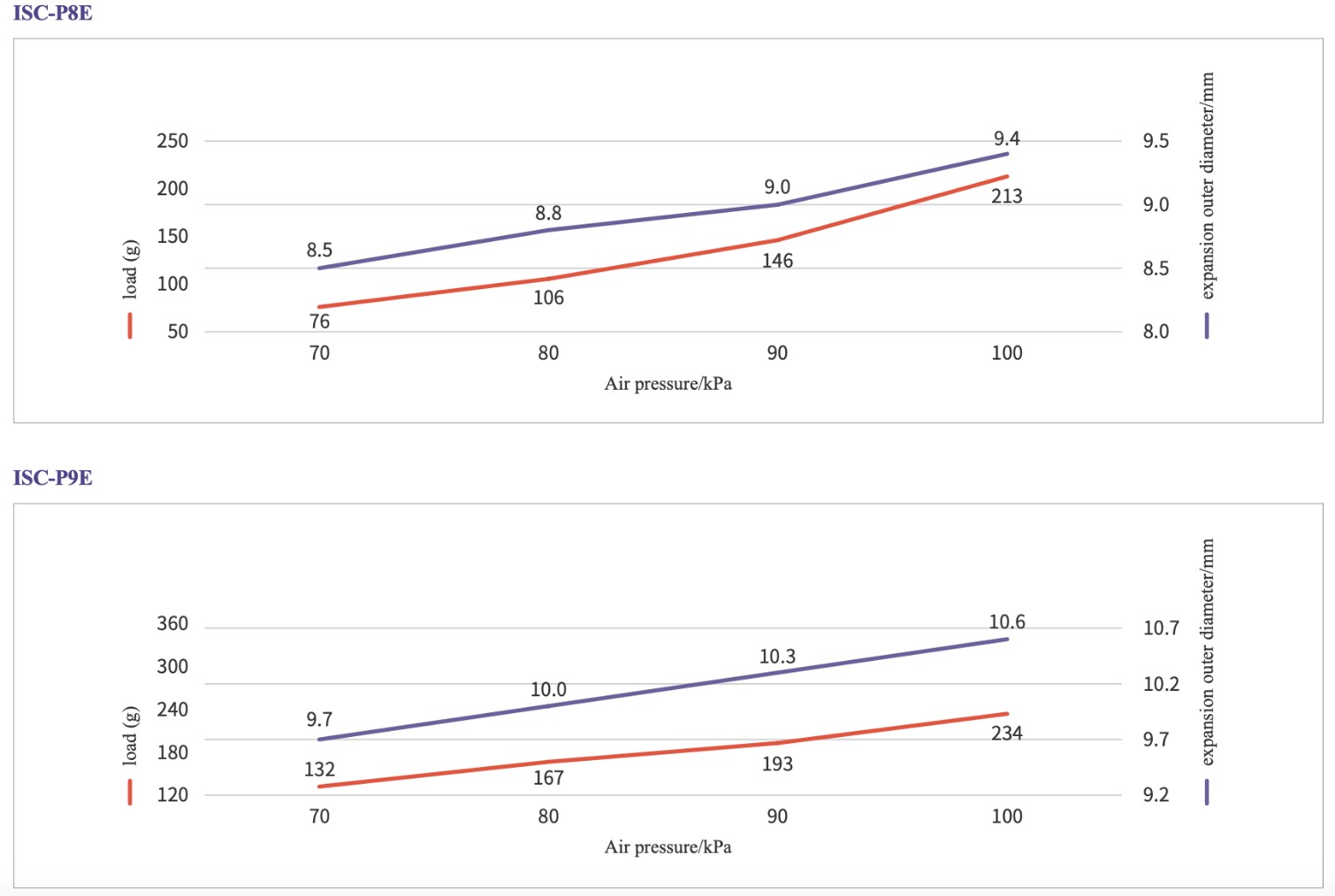
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
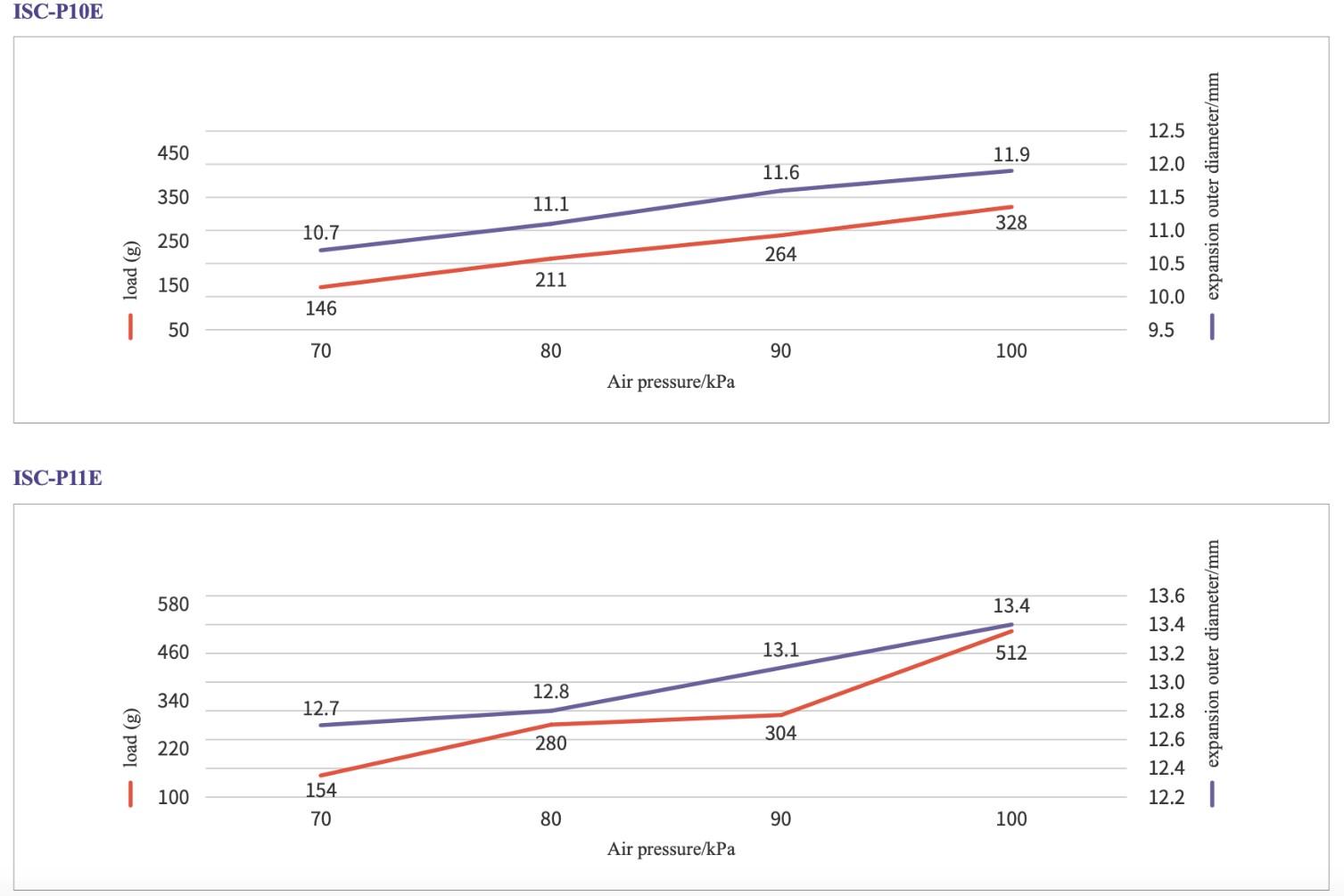
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
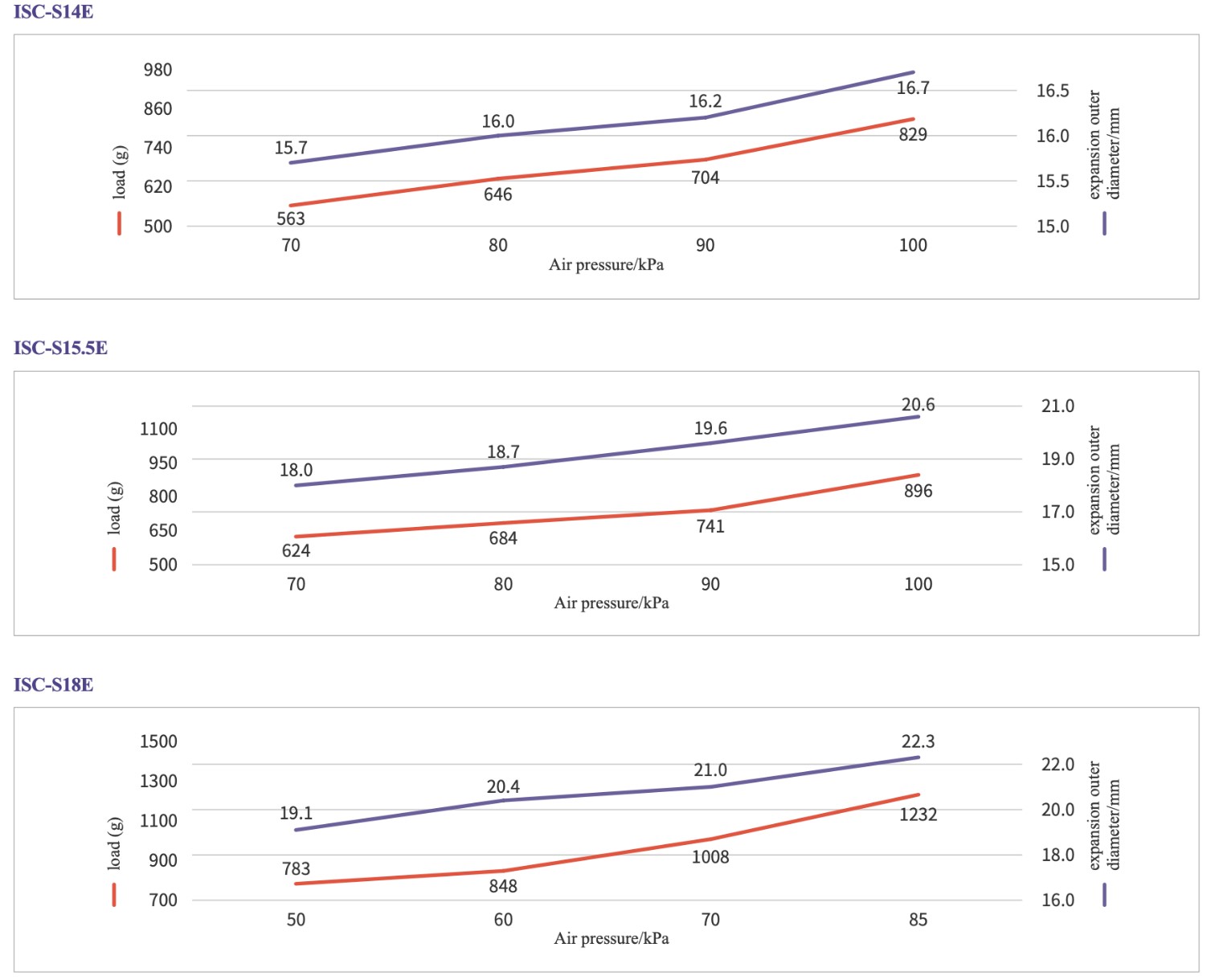
| ISC-SC6-S14E | 0-100 | 16.7 | DCCCXXIX | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | DCCCXCVI | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
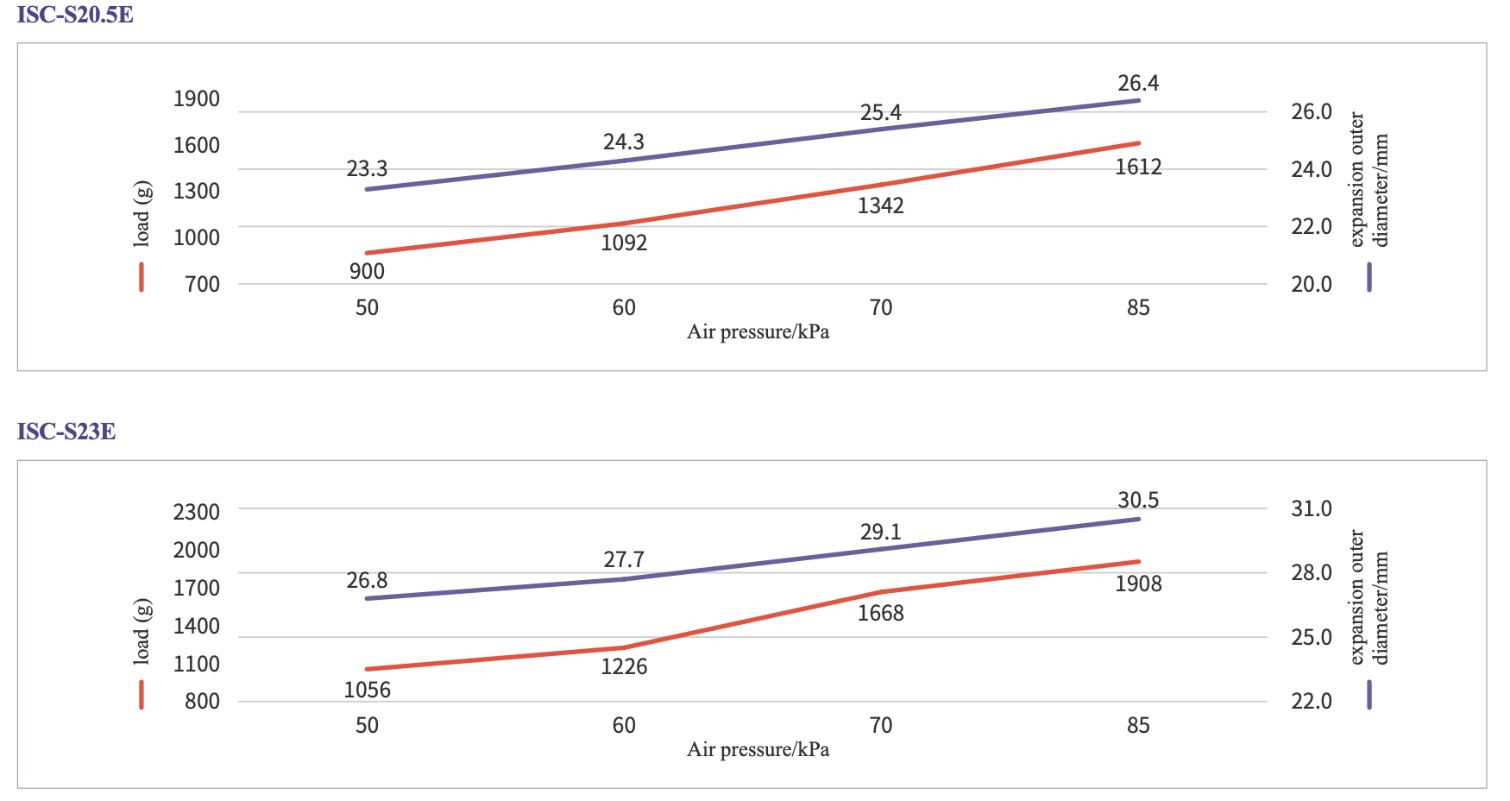
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30.5 | 1908 | 51 | VFNT 1421-G18 | 14.5 |
* Series P obiecti probationis oneris maximi est diameter exterior exemplaris +0.3mm; series S obiecti probationis oneris maximi est diameter exterior exemplaris +1mm; Onus probationis instrumentis peritis metitur.
Negotium Nostrum


Categoriae productorum
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGD –...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-13...
-

SERIES MUTATIONIS CELERIS – QCA-200-D1 Mutatio Celeris...
-

SERIES CELERIS MUTATIONIS – QC-200 Rotunda Manualis...
-

SERIES MUTATIONIS CELERIS – QCA-S100 Mutatio Celeris...
-

SERIES MUTATIONIS CELERIS – QCA-S500 Mutatio Celeris...