SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Parallela Z-EFG-20


Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica

·Moderator inclusus
· Ictus et vis prehensionis adaptabiles
· Finis mutari potest ut variis necessitatibus accommodetur
· Res fragiles et deformabiles, ut ova, tolle.tubi experimentales, anuli, et cetera.
· Ad loca sine aere fonte applica (e.g. laboratorium, valetudinarium)
Accuratio ad moderandum, ad prehendendum in spatio parvo, celeris et stabilis ad prehendendum.
Magna Vis Prehensionis
Ictus totus est 20mm, vis premendi 80N.
Accuratio ad Imperium
Repetibilitas: ±0.02mm
Longa Vita
Decies miliones cyclorum, ultra pincem pneumaticam
Moderator intus est
Spatium parvum occupans, commodum ad integrandum.
Modus Moderationis
Impulsus, moderatores I/O pro optione
Mollis Fixatio
Res fragiles premere potest




Specificatio Parameter
| Numerus exemplaris Z-EFG-20 | Parametri |
| Summa ictus | XX mm |
| Vis prehensionis | 30~80N |
| Repetibilitas | ±0.02mm |
| Pondus prehensionis commendatum | 0.8kg |
| Transmissio modus | Crema rotarum + Dux rotulorum transversalis |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.45secunda |
| Ambitus temperaturae operandi | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80()Nulla pruina() |
| Modus motus | Duo digiti horizontaliter moventur |
| Moderatio ictus | Adaptabilis |
| Adaptatio vis premendi | Adaptabilis |
| Pondus | 0.458kg |
| Dimensiones()L*L*A() | 44*30*124.7mm |
| Collocatio moderatoris | Incorporatus |
| Potestas | 5W |
| Typus motoris | DC sine spazzolis |
| Current Maximus | 1A |
| Tensio aestimata | 24V |
| Currens subsidiarius | 0.2A |
| Impetus resistens / vibrationi resistens | 98m/s |
| Diameter motoris | 28mm |
* Vis prehensionis Z-EFG-20: Vis prehensionis adaptari potest addendo materiam deformationis moderatae ad frontem instrumenti, quae secundum curvam deformationis et vis correspondentem obtinetur.
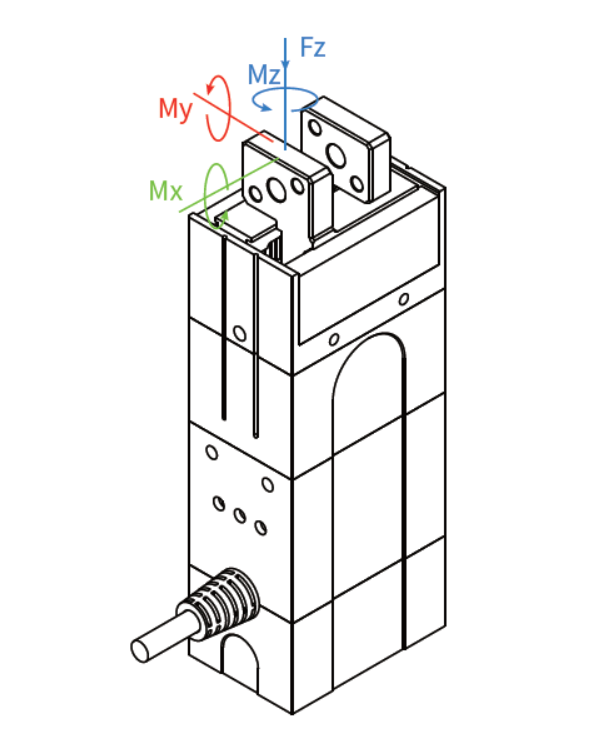
| Onus staticum permissum in directione verticali | |
| Ex: | 150N |
| Momentum torquens permissum | |
| Mx: | 2.1 Nm |
| Meum/Mea: | 2.34 Nm |
| Mz: | 2 Nm |
Magna Vis Prehensionis, Accurata Vis Moderatio

Prehensor electricus designum transmissionis specialem et compensationem calculi impulsoris adoptavit, vis premendi 80N continue adaptabilis est, cursus totalis 20mm est, et repetibilitas ±0.02mm.
Modus Motus et Ictus Adaptabiles
Motus prehensoris electrici ad motum parallelum duorum digitorum pertinet, brevissimum tempus ictus singularis tantum 0.45s est, pondus prehensionis ≤0.8Kg, requisito prehensionis stabilis pro linea productionis satisfacere potest.
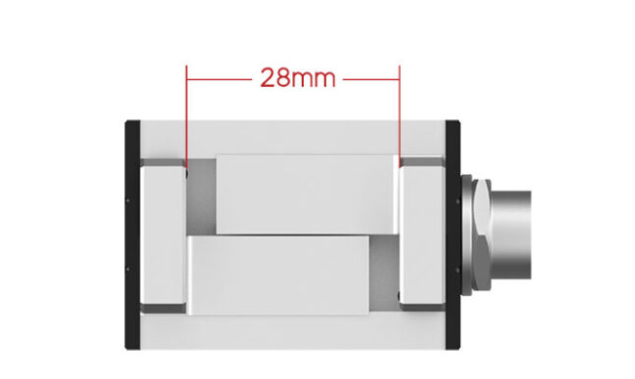
Structura Compacta, Flexibilis ad Installandum.

Magnitudo Z-EFG-20 est L40*W30*H124.7mm, structura eius compacta est, plus quam quinque modos institutionis sustinet, moderator eius inclusus est, spatium parvum occupans, quo varia officia prehensionis facile perfici possunt.


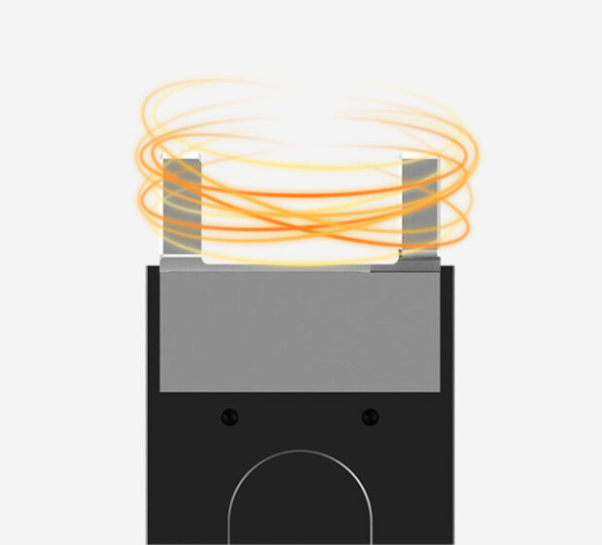
Impulsus et Moderator Integratus, Mollis Clausura

Cauda Z-EFG-20 facile mutari potest, clientes res desideratas prehendere, caudam designare, et prementem electricam retinere possunt ad officia prehensionis quam maxime perficienda.
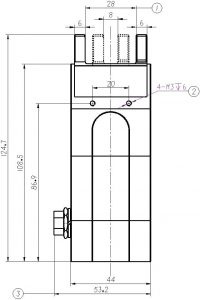
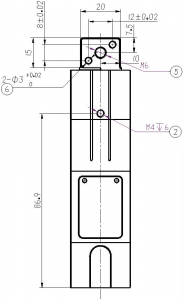
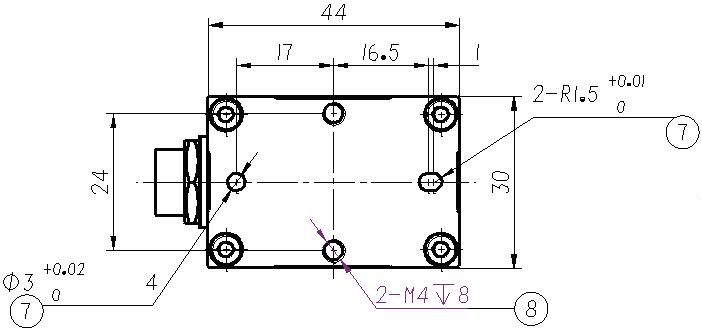
Diagramma Installationis Dimensionis
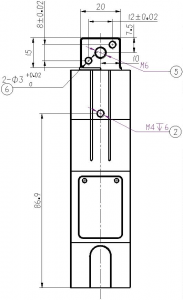
① Motus digitorum prehensoris
② Positio lateralis montandi (foramen filetatum)
③ Locus filorum socketorum aviationis
④ Situs vis adaptationis prehensoris (sinistra) et lucis indicatricis (dextra)
⑤ Situs institutionis prehensoris (foramen filetatum)
⑥ Situs institutionis pinzae (foramen aciculi)
⑦ Ima positio (foramen clavorum)
⑧ Ima positio montandi ((foramen filetatum)
Negotium Nostrum


Categoriae productorum
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C5...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGI –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGI –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGI –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGC –...