SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Parallela Z-EFG-20F



Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica
● Vis accurata temperanda, celeriter fragilia obiecta prehendenda
● Vis Accurata Moderatio Cito ad Prehendendum
● Celer ad Movendum et Fragilis Fixatio
● Figura Parva, Facilis ad Integrandum
● Impulsus Integratus et Moderator Mollis Clausura
● Modi Multi-Imperii Faciles ad Operandum
Vis, Frequentia et Celeritas per Modbus regi possunt.
Celeriter Aperire/Claudire
Tempus motus unius ictus est 0.1s
Magnitudo Parva
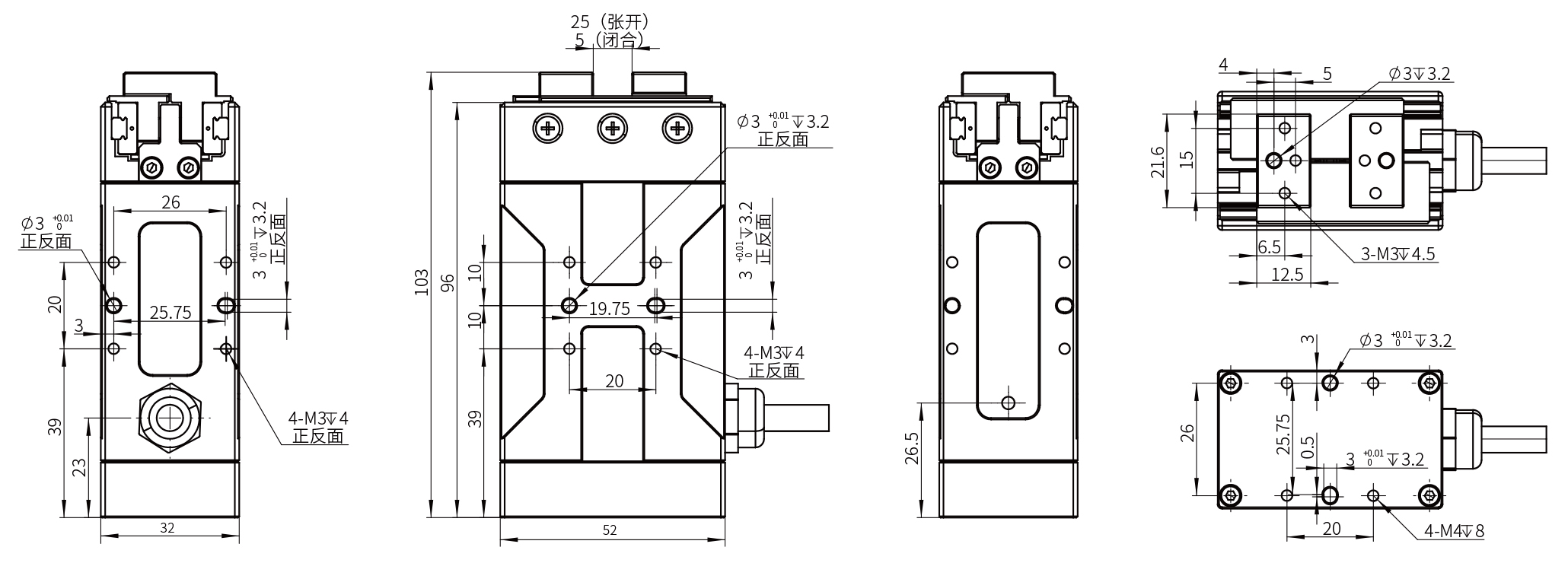
Magnitudo eius est 52*32*103mm
Imperium Vis Altae Praecisionis
Imperium vis altae praecisionis ±0.3N, vis est 1-8N.
Moderator intus est
Parvum cubiculum occupans, commodum ad integrandum
Modus Moderationis
Ad 485 (Modbus RTU) et Imperium I/O sustinendum.
Mollis Fixatio
Res fragiles premere potest

● Revolutionem in substitutione prensarum pneumaticarum prensis electricis promovens, prima prensa electrica cum systemate servo integrato in Sinis.
● Substitutio perfecta compressoris aeris + filtri + valvulae solenoidis + valvulae suffocatoriae + pinzae pneumaticae
● Vita utilis per plures cyclos, congruens cum cylindro Iaponico traditionali




Specificatio Parameter
| Numerus exemplaris Z-EFG-20F | Parametri |
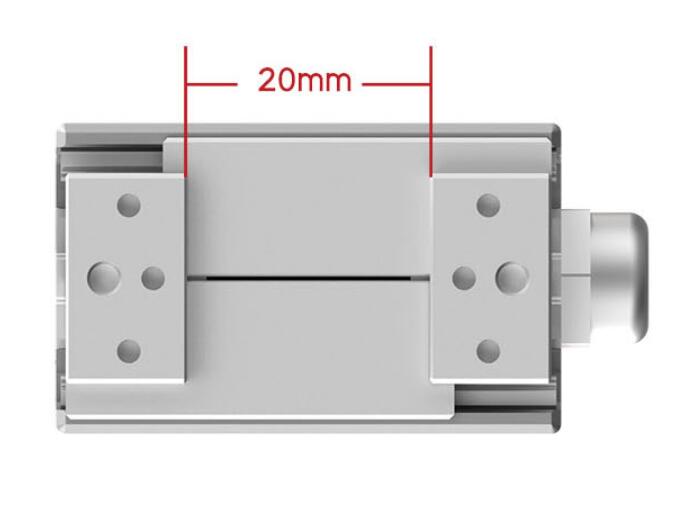
| Ictus totalis | 20mm adaptabilis |
| Vis prehensionis | 1-8N adaptabilis |
| Repetibilitas | ±0.02mm |
| Pondus prehensionis commendatum | ≤0.1kg |
| Modus transmissionis | Crema rotarum + Dux linearis |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.1s |
| Modus motus | Duo digiti horizontaliter moventur |
| Pondus | 0.5kg |
| Dimensiones (L*L*A*A) | 52*32*103mm |
| Tensio operativa | 24V±10% |
| Current aestimatus | 0.4A |
| Currentis maximi | 1A |
| Potestas | 10W |
| Classis tutelae | IP20 |
| Typus motoris | DC sine spazzolis |
| Ambitus temperaturae operativae | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80 (Sine pruina) |
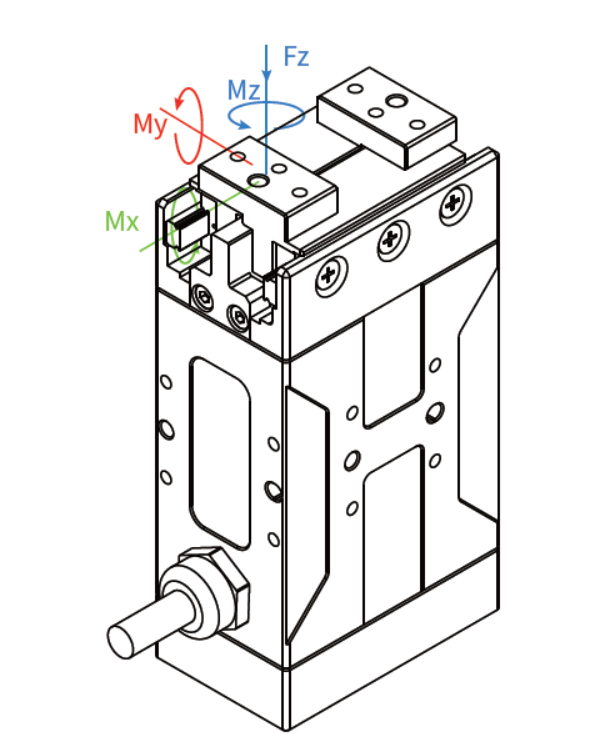
| Onus staticum permissum in directione verticali | |
| Ex: | 120N |
| Momentum torquens permissum | |
| Mx: | 0.6 nm |
| Meum/Mea: | 1 Nm |
| Mz: | 1 Nm |
Vis Accurata Imperium Cito ad Prehendendum
Prehensor electricus Z-EFG-20F designum transmissionis specialem et compensationem algorithmi impulsoris adhibet, cursus eius totus 20mm pervenit, vis premendi 1-8N est.

Celer ad Movendum et Fragilis Fixatio
Crassitudo huius prehensoris electrici tantum 32mm est, distantia unilateralis motus tantum 0.1s; convenire potest ad producendum in spatio parvo, celeriter et stabile ad prehendendum.
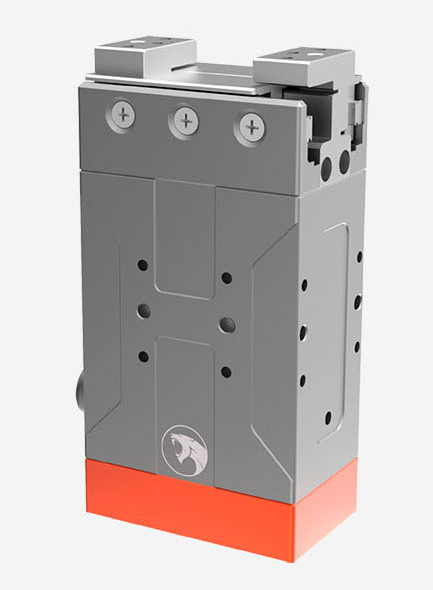
Figura Parva, Commoda ad Integrandum

Magnitudo Z-EFG-20F est L 52*W 32*H 103mm, structura eius compacta est, ut multiplices modos institutionis flexibiles sustineat, moderator eius inclusus est, spatium parvum occupans, quod facile permittit varia officia prehensionis tractare.

Impulsus Integratus et Moderator Mollis Clamping
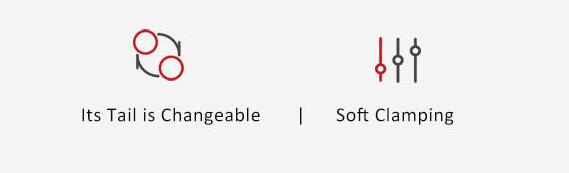
Vis prehensionis, terebra et celeritas eius moderari possunt, fibula caudalis facile mutari potest, emptor res suas petitas prehendere potest, fibulam caudalem designare, et ut prehensor electricus munus prehensionis quam maxime perficere possit.
Modi Multi-Imperii Faciles ad Operandum
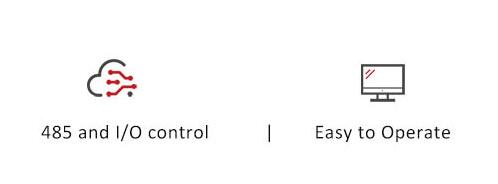
Simplex est configuratio prensoris electrici Z-EFG-20F, multis modis moderandi praeditus, ad 485 (Modbus RTU) et dominationem bus I/O sustinendam, uno tantum filo opus est, corrigi et programmate adhiberi potest.

Centrum Gravitatis Oneris Aberrans
Negotium Nostrum


Categoriae productorum
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGC –...
-

Prehensor Roboticus Collaborativus – ISC Inner S...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C6...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGI –...