SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Parallela Z-EFG-20S


Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica

·Prehensor electricus cum servomotore parvus sed potens.
· Terminales mutari possunt ut variis requisitis incepti satisfaciant.
· Res fragiles et deformabiles, ut ova, tubulos experimentales, anulos, et cetera, tollere potest.
· Idoneum locis sine fontibus aeris (velut laboratorium et nosocomia).
● Revolutionem in substitutione prensarum pneumaticarum prensis electricis promovendo, prima prensa electrica cum systemate servo integrato in Sinis.
● Substitutio perfecta compressoris aeris + filtri + valvulae solenoidis + valvulae suffocatoriae + pinzae pneumaticae
● Vita utilis per plures cyclos, congruens cum cylindro Iaponico traditionali




Specificatio Parameter
Z-EFG-20s est prensor electricus cum servomotore. Z-EFG-20S motorem et moderatorem integratos habet, magnitudine parva sed potentem. Prensos pneumaticos traditionales substituere et multum spatii laboris servare potest.
●Prehensor electricus cum servomotore parvus sed potens.
●Terminales mutari possunt ut variis requisitis incepti satisfaciant.
●Res fragiles et deformabiles, ut ova, tubulos experimentales, anulos, et cetera, tollere posset.
●Idoneum locis sine fontibus aeris (ut laboratorium et nosocomia).
| Numerus exemplaris Z-EFG-20S | Parametri |
| Ictus totalis | XX mm |
| Vis prehensionis | 8-20N (Adaptabilis) |
| Modus motus | Duo digiti horizontaliter moventur |
| Pondus prehensionis commendatum | 0.3kg |
| Modus transmissionis | Crema rotarum + Dux rotulorum transversalis |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.15s |
| Pondus | 0.35kg |
| Dimensiones | 43*24*93.9mm |
| Tensio operativa | 24V±10% |
| Current aestimatus | 0.2A |
| Maxima intensitas | 0.6A |
| Classis tutelae | IP20 |
| Typus motoris | Motor servo |
| Ambitus temperaturae operandi | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80 (Sine pruina) |
| Ictus adaptabilis | Non-adaptabilis |
| Collocatio moderatoris | Incorporatus |
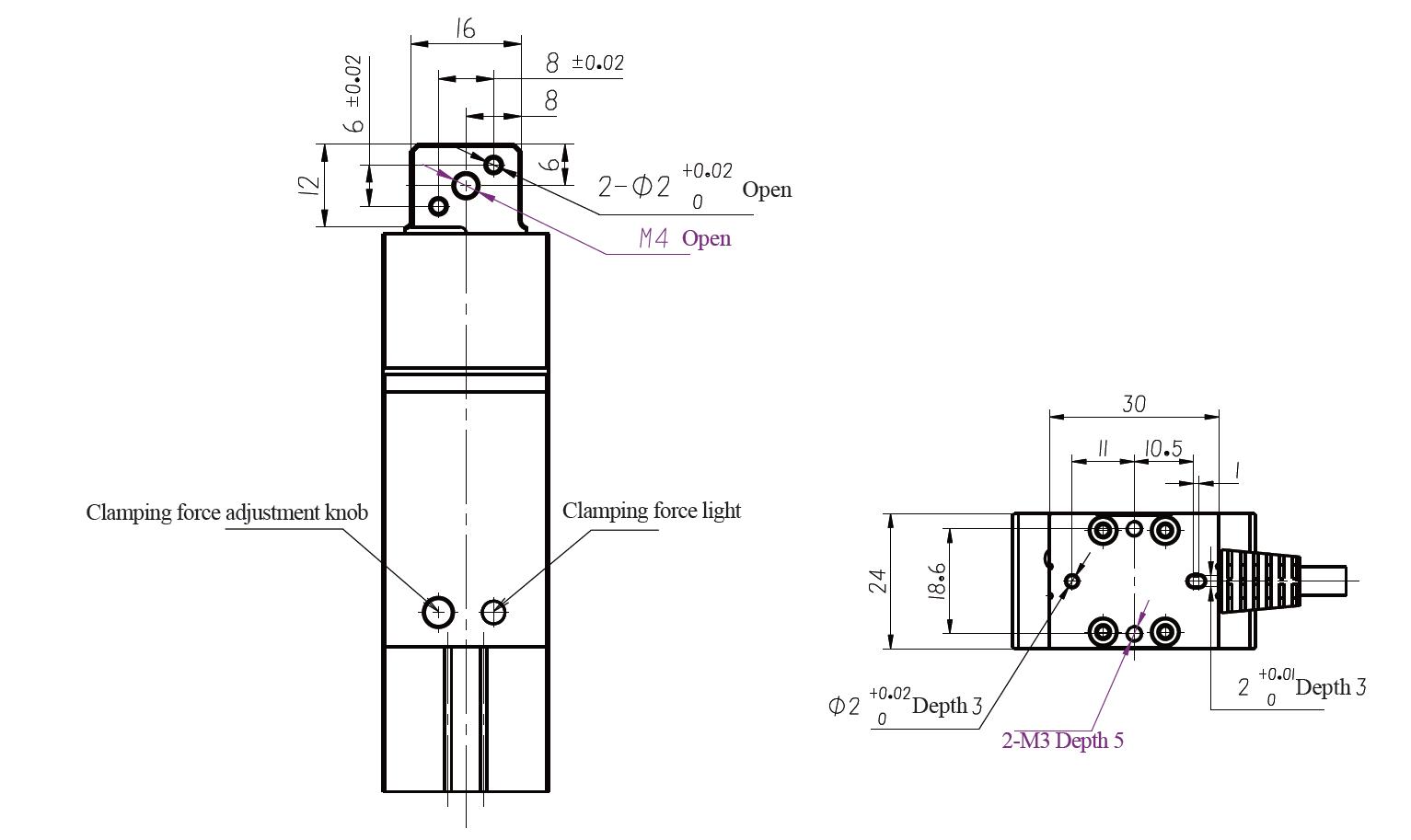
Diagramma Installationis Dimensionis

Quaestiones Frequentes
1. Concentricitas rotationis necessaria est, ergo cum duae partes prensoris prope sunt, num in media positione singulis vicibus subsistit?
Responsum: Ita, error symmetriae est <0.1mm, et repetibilitas est ±0.02mm.
2. Num comprehensor partem fixationis includit?
Responsum: Minime. Usoribus necesse est suas partes fixationis secundum res actu fixas designare. Praeterea, Hitbot nonnullas bibliothecas fixationum praebet; rogamus te ut nostros operarios pro pluribus singulis contactum facias.
3. Ubi est regulator impulsoris et num mihi pecuniam additam pro eo solvere necesse est?
Responsum: Intra est, nullum pretium additum, pretium prensoris iam sumptum moderatoris includit.
4. Estne possibile unum digitum movere?
Responsum: Non, pinzae unius digiti adhuc in evolutione sunt, plura cognoscendi causa, quaeso, nostros operarios consule.
5. Quaenam est celeritas operationis Z-EFG-20S?
Responsum: Z-EFG-20S 0.15secunda pro ictu pleno in unam directionem et 0.3secunda pro itinere circulari sumit.
6. Quaenam est vis prehensionis Z-EFG-20S et quomodo eam adaptare?
Responsum: 8-20N, globulo adaptabilis.
7. Quomodo ictum Z-EFG-20S aptare?
Responsum: Z-EFG-20S ictum aptandum non sustinet.
8. Estne prehensor electricus aquae impervius?
Responsum: Classis tutelae IP 20.
9. Cuius generis motor in Z-EFG-20S adhibetur?
Responsum: Motor servo.
10. Num fieri potest ut maxillae Z-EFG-8S vel Z-EFG-20S ad res maiores quam 20mm prehendendas adhibeantur?
Responsum: Ita, 8mm et 20mm ad ictum effectivum referuntur, non ad magnitudinem obiecti prehendendi.
Z-EFG-8S adhiberi potest ad res prehendendas cum differentia magnitudinis maximae ad minimam intra 8mm. Z-EFG-20S adhiberi potest ad res prehendendas cum differentia magnitudinis maximae ad minimam.
intra 20 mm.
11. Si pergit operari, num motor prehensoris electrici nimium calescet?
Responsum: Post probationes professionales, temperatura superficiei Z-EFG-20S non excedet gradus 60 cum continue prehenditur ad temperaturam circiter 30 graduum.
Negotium Nostrum


Categoriae productorum
-

DH ROBOTICS SERVO ELECTRICA PRESSORA SERIES PGE –...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-60...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-20F Para...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-L Collaboratio...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGI –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES CG – ...