SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Parallela Z-EFG-26



Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica
· Detectio casus prementis, functio areae output
· Vis, positio et celeritas per Modbus accurate regi possunt.
· Longa vita: decies centena milia cyclorum, ungues aereos superans
· Moderator inclusus: vestigium parvum, integratio facilis
·Modus moderandi: 485 (Modbus RTU), I/O
Vis premendi, celeritas potest accurate moderari per Modbus
Applicatio Multiplex
Detectionem casum prehensionis et exitum districtus habet.
Accuratum ad Imperium
Vis premendi, cuspis, celeritas per Modbus regi possunt.
Longa Vita
Decem miliones cycli, super pinzam pneumaticam
Moderator Incorporatus
Spatium parvum occupans, commodum ad integrandum.
Celer ad Reagendum
Brevissimum tempus ictus singularis est tantum 0.25s
Mollis Fixatio
Res fragiles, ut ovum, poculum vitreum, et cetera, premere potest.




Specificatio Parameter
Z-EFG-26 est prehensor electricus parallelus duorum digitorum, parvus magnitudine sed potens ad prehendenda multa obiecta mollia, ut ova, fistulas, partes electronicas, et cetera.
● Prehensor electricus Z-EFG-26 moderatorem inclusum habet.
●Ictus et vis prehensionis eius adaptari possunt.
●Terminales mutari possunt ut variis requisitis accommodentur.
●Facile tolle res fragiles et deformabiles, ut ova, tubulos experimentales, anulos, et cetera.
●Idoneum locis sine fontibus aeris (ut laboratorium et nosocomia).
| Numerus exemplaris Z-EFG-26 | Parametri |
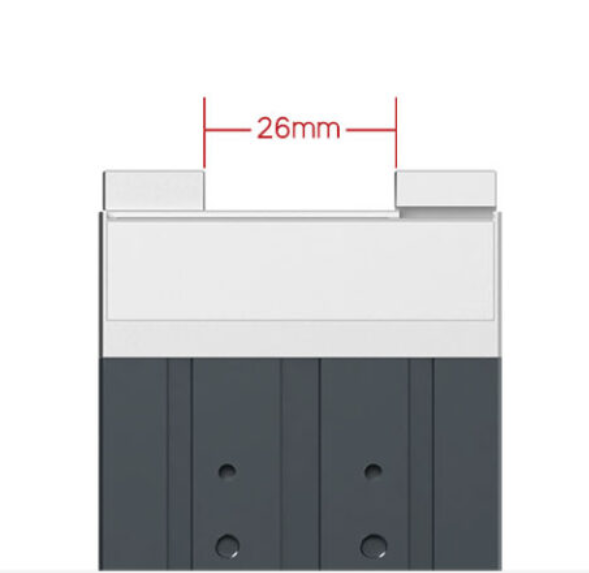
| Summa ictus | 26mm |
| Vis prehensionis | 6~15N |
| Repetibilitas | ±0.02mm |
| Pondus prehensionis commendatum | Maximum 0.3kg |
| Transmissio modus | Crema rotarum + Dux rotulorum transversalium |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.25secunda |
| Ambitus temperaturae operativae | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80()Nulla pruina() |
| Modus motus | Duo digiti horizontaliter moventur |
| Moderatio ictus | Adaptabilis |
| Adaptatio vis premendi | Adaptabilis |
| Pondus | 0.45kg |
| Dimensiones()L*L*A() | 55*26*97mm |
| Collocatio moderatoris | Incorporatus |
| Potestas | 10W |
| Typus motoris | DC sine spazzolis |
| Current Maximus | 1A |
| Tensio aestimata | 24V |
| Currens subsidiarius | 0.4A |
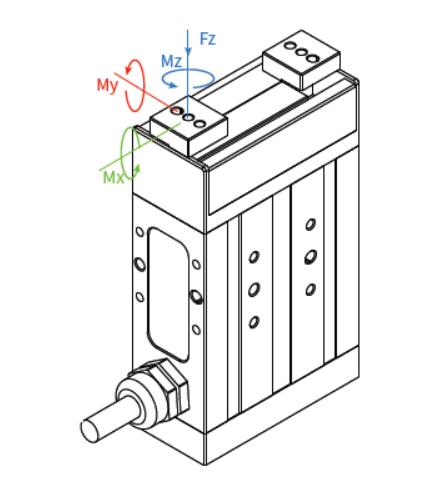
| Onus staticum permissum in directione verticali | |
| Ex: | 250N |
| Momentum torquens permissum | |
| Mx: | 2.4 Nm |
| Meum/Mea: | 2.6 Nm |
| Mz: | 2 Nm |
Praecisio Imperium Vis Accuratio ad Repetendum

Prehensor electricus designum transmissionis specialem et calculationem impulsionis ad compensandum adoptavit; cursus eius totalis 26mm est, vis prehensionis 6-15N est, cursus et vis prehensionis aptari possunt, et repetibilitas eius ±0.02mm est.
Celeris Reactio, Stabilior

Brevissimum tempus ictus singularis est tantum 0.25secunda, quod celeris et stabilis prehensionis requisitis lineae productionis satisfacere potest.
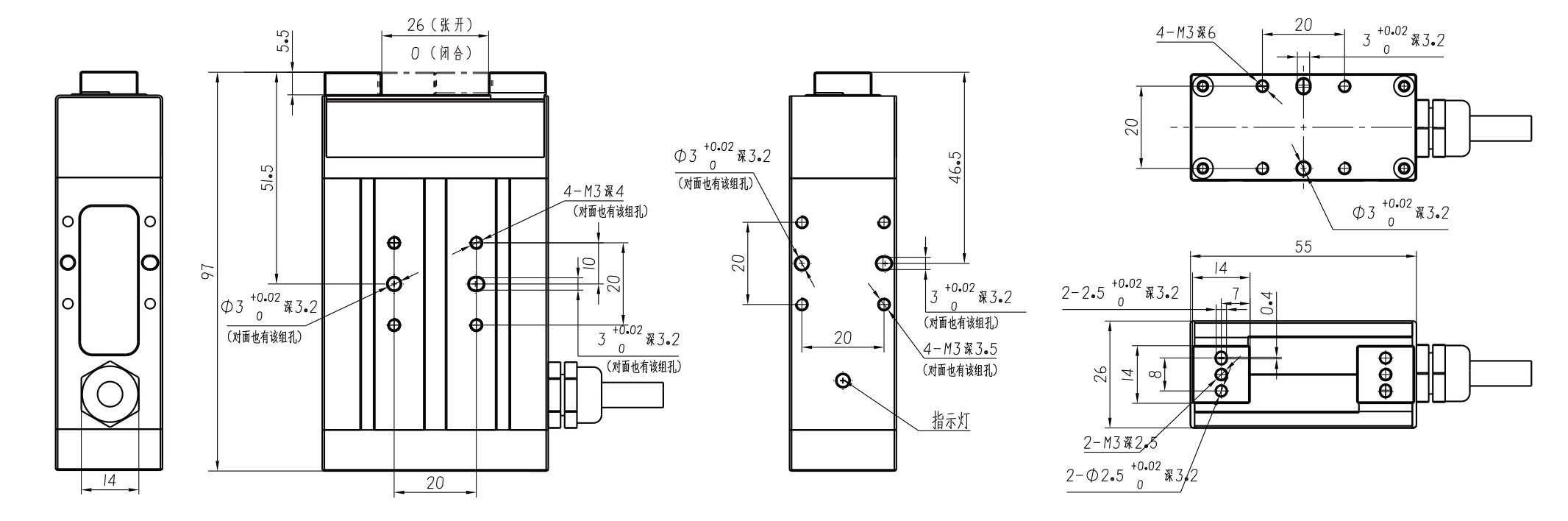
Figura Parva, Facile Interportanda

Magnitudo Z-EFG-26 est L 55*W 26*H 97mm, structura eius compacta est, plus quam quinque modos institutionis flexibiles sustinet, moderatore incluso, spatium parvum occupat, multa officia pro variis requisitis prehensionis facile tractare potest.

Impulsus Integratus et Moderator Mollis Clamping

Pars cauda prehensori electrico facile mutari potest, pondus eius prehensionis 300g est; clientes partem caudam prehensori specialiter designare possunt ut suis propriis obiectis prehensionis conveniat, ut prehensor electricus officia prehensionis quam maxime perficere possit.
Modi Multiplicati Moderationis, Facile Operandum

Configuratio prensoris Z-EFG-26 simplex est, modos moderandi abundantes habet: 485 (Modbus RTU), Pulsus, I/O, et cum systemate moderandi principali PLC compatibilis est.

Diagramma Installationis Dimensionis
Negotium Nostrum


Categoriae productorum
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-10...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGD –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGC –...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C3...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-30 Paral...
-

DH ROBOTICS SERVO ELECTRICA PRESSORA SERIES PGE –...