SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Parallela Z-EFG-30



Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica

·Moderator inclusus
· Ictus et vis prehensionis adaptabiles
·Utere servomotore
· Finis mutari potest ut variis necessitatibus accommodetur
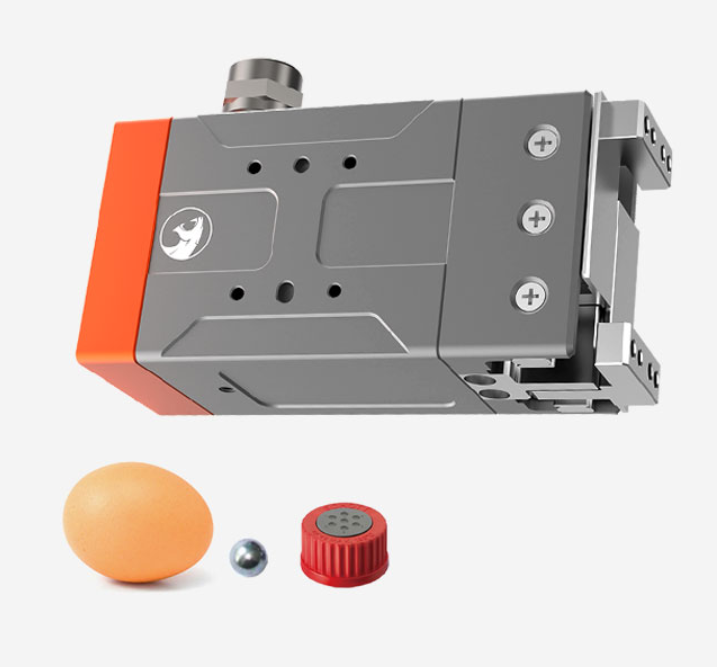
· Res fragiles et deformabiles, ut ova, tubulos experimentales, anulos, et cetera, tolle.
· Ad loca sine aere fonte applica (e.g. laboratorium, valetudinarium)
Vis, Frequentia et Celeritas per Modbus regi possunt.
Applicatio Multiplicata
Examen casus prehensionis et exitus districtus.
Accuratio ad Imperium
Vis, bit, celeritas per Modbus regi possunt.
Longa Vita
Circuli decem milionum,prehensor aereus pontis superioris
Moderator intus est
Tegumentum cubiculi parvi, commodum ad integrandum.
Modus Moderationis
485 (Modbus RTU), Impulsus, I/O
Mollis Fixatio
Res fragiles premere potest

● Revolutionem in substitutione prensarum pneumaticarum prensis electricis promovens, prima prensa electrica cum systemate servo integrato in Sinis.
● Substitutio perfecta compressoris aeris + filtri + valvulae solenoidis + valvulae suffocatoriae + pinzae pneumaticae
● Vita utilis per plures cyclos, congruens cum cylindro Iaponico traditionali




Specificatio Parameter
Z-EFG-30 est prensor electricus cum servomotore. Z-EFG-30 motorem et moderatorem integratos habet, magnitudine parva sed potentem. Prensos pneumaticos traditionales substituere et multum spatii laboris servare potest.
● Parva sed potens prehensora electrica cum servomotore.
● Terminales mutari possunt ut variis requisitis incepti satisfaciant.
● Res fragiles et deformabiles, ut ova, tubulos experimentales, anulos, et cetera, tollere potest.
● Idoneum locis sine fontibus aeris (velut laboratorium et nosocomia).
Prehensor electricus designo transmissionis speciali et compensatione calculi impulsoris utitur; vis prehensionis 10N-40N continue adaptabilis est, et repetibilitas eius ±0.02mm est. Brevissimus ictus singularis tantum 0.2s est, celeritatis altae et stabilitatis prehensionis requisitis linearum productionis satisfacere potest. Pars cauda Z-EFG-30 facile mutari potest; clientes res pro sua voluntate prehendere possunt, caudam ipsi designare, et prehensor electricus munus prehensionis quam maxime perficere potest.
| Numerus exemplaris Z-EFG-30 | Parametri |
| Ictus totalis | 30mm adaptabilis |
| Vis prehensionis | 10-40N adaptabilis |
| Repetibilitas | ±0.2mm |
| Pondus prehensionis commendatum | ≤0.4kg |
| Modus transmissionis | Crema rotarum + Dux linearis |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.20s |
| Modus motus | Duo digiti horizontaliter moventur |
| Pondus | 0.55kg |
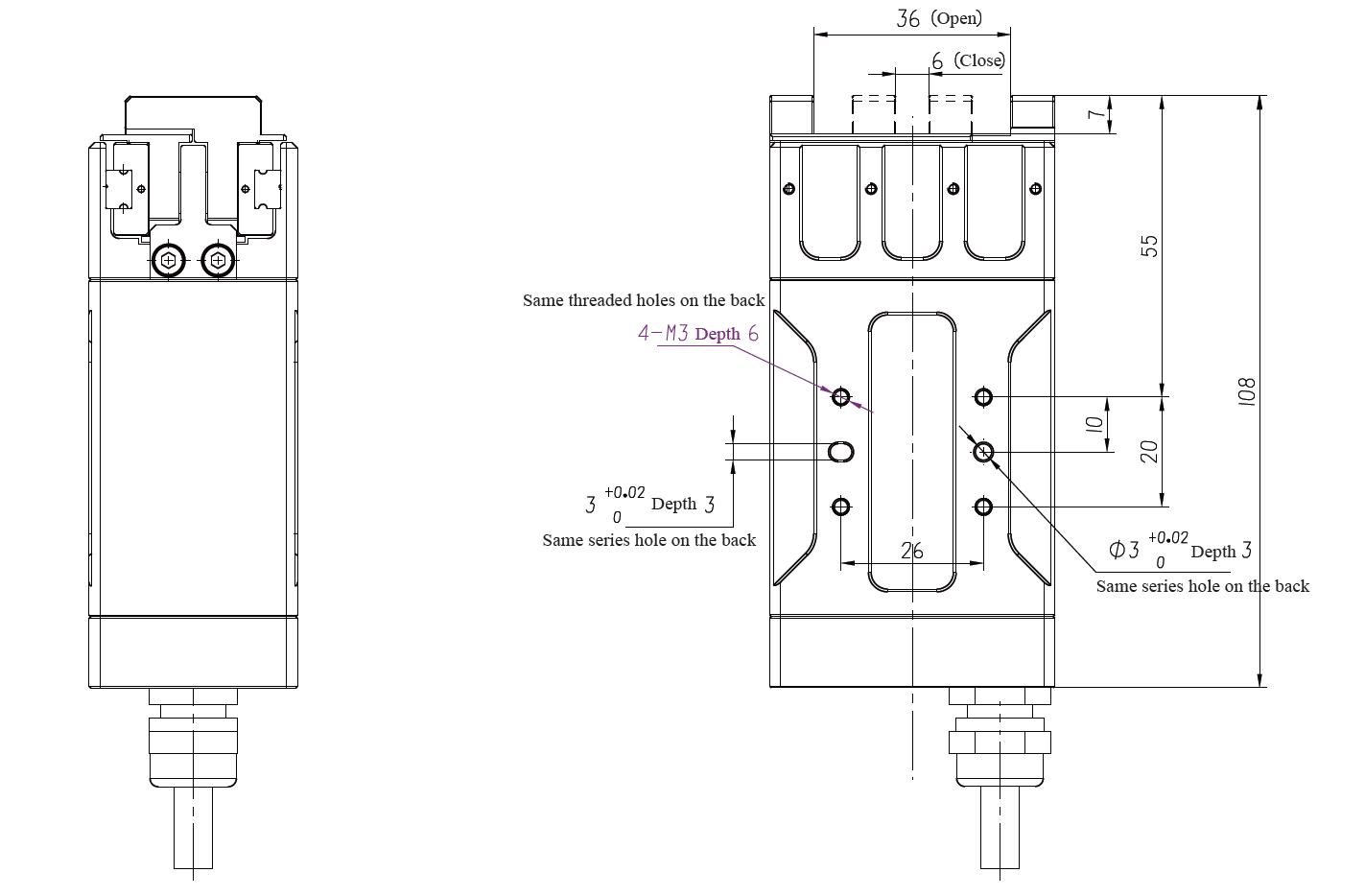
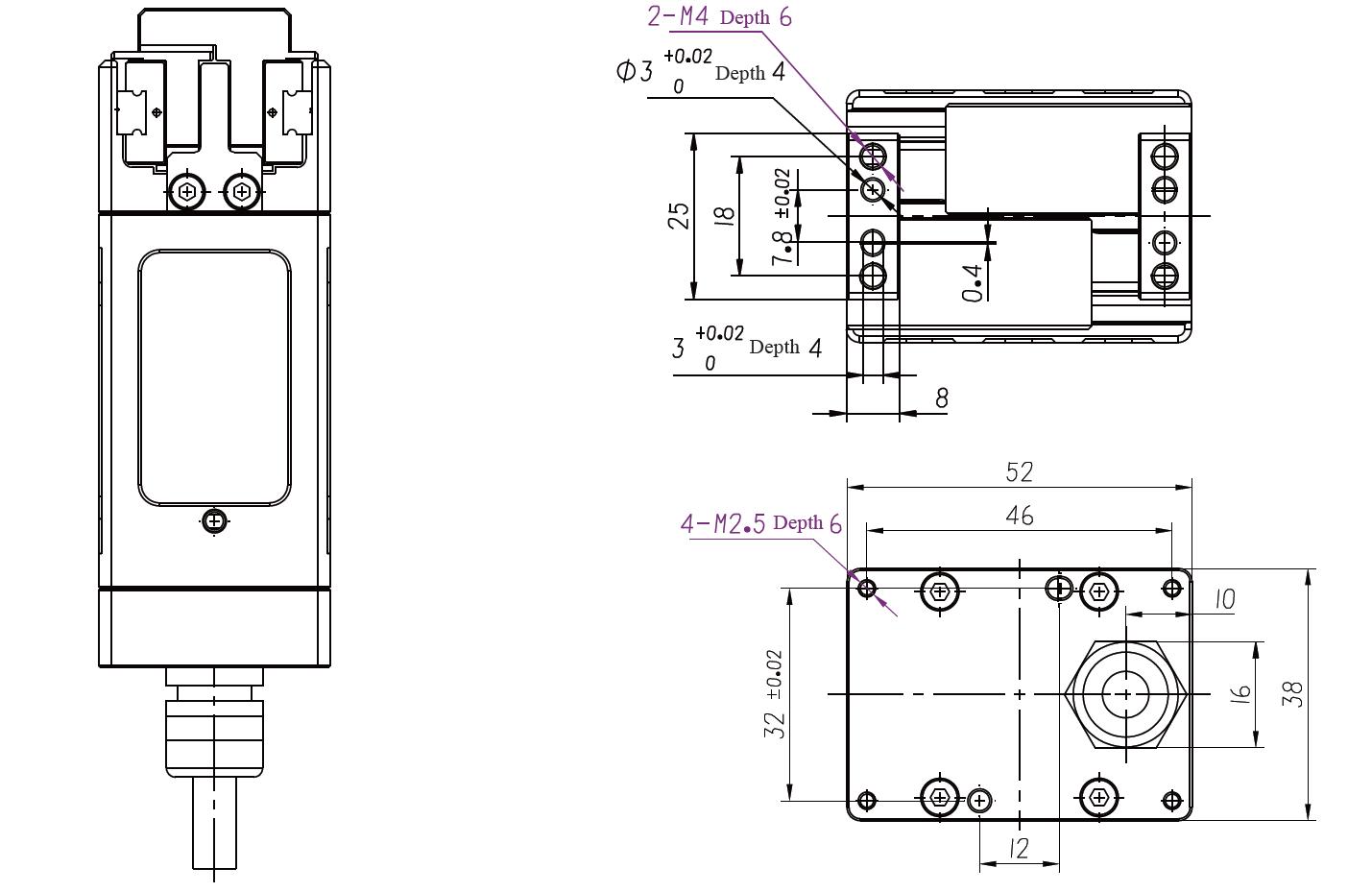
| Dimensiones (L*L*A*A) | 52*38*108mm |
| Tensio operativa | 24V±10% |
| Current aestimatus | 0.5A |
| Currentis maximi | 1A |
| Potestas | 12W |
| Classis tutelae | IP20 |
| Typus motoris | DC sine spazzolis |
| Ambitus temperaturae operandi | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80 (Sine pruina) |
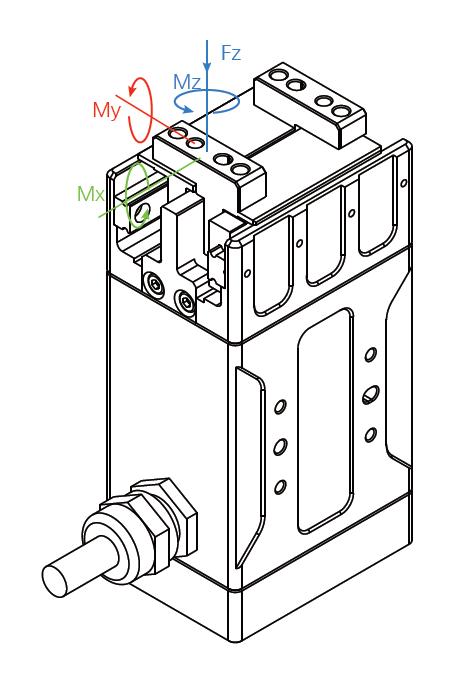
| Onus staticum permissum in directione verticali | |
| Ex: | 200N |
| Momentum torquens permissum | |
| Mx: | 1.6 Nm |
| Meum/Mea: | 1.2 Nm |
| Mz: | 1.2 Nm |
Accuratio Vis Imperium, Alta Praecisio

Prehensor electricus designum transmissionis specialem et compensationem calculi impulsoris adhibet, vis premendi 10N-4ON continue adaptabilis est, et repetibilitas eius +0.02mm est.
Celer ad Reagendum cum Stabilitate
Brevissimus ictus singularis tantum 0.2s est, occurrere potestRequisita celeritatis altae et stabilis prehensionis linearum productionis.
Figura Parva, Commoda ad Integrandum
Magnitudo Z-EFG-30 est L 52*W 38*H 108mm, structura eius compacta est, et plus quam quinque typos institutionis flexibilis sustinet, moderator eius inclusus est, spatium parvum occupans, facile requisitis variorum operum prehensionis satisfacit.

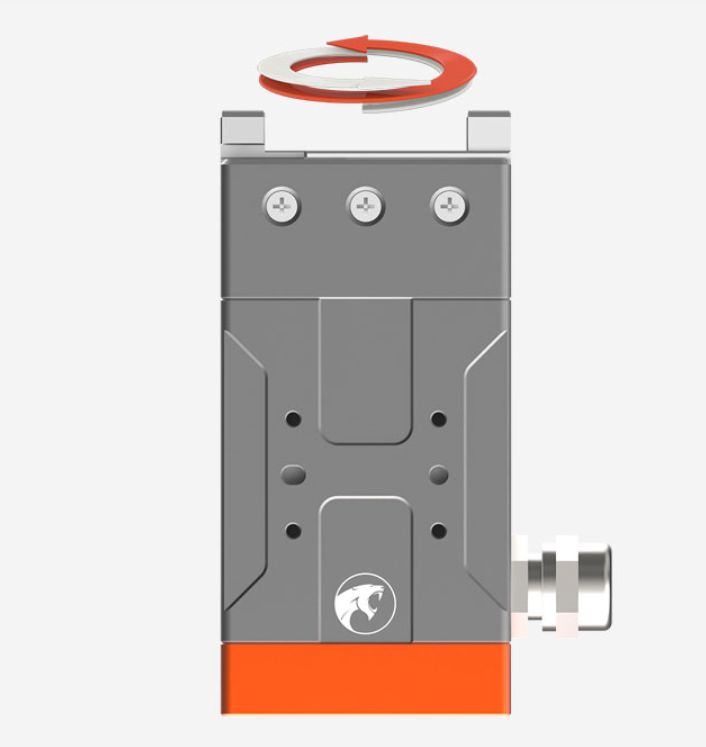
Impulsus et Moderator Integrati, Fixatio Mollis
Pars caudae Z-EFG-30 facile mutari potest, clientes res pro sua voluntate prehendere possunt, caudam ipsi designare, et pinza electrica munus prehensionis ad summum perficere possunt.
Centrum Gravitatis Oneris Aberrans
Quaestiones Frequentes
1. Concentricitas rotationis necessaria est, ergo cum duae partes prensoris prope sunt, num in media positione singulis vicibus subsistit?
Responsum: Ita, error symmetriae est <0.1mm, et repetibilitas est ±0.02mm.
2. Num comprehensor partem fixationis includit?
Responsum: Minime. Usoribus necesse est suas partes fixationis secundum res actu fixas designare. Praeterea, Hitbot nonnullas bibliothecas fixationum praebet; rogamus te ut nostros operarios pro pluribus singulis contactum facias.
3. Ubi est regulator impulsoris et num mihi pecunia addita pro eo solvere necesse est?
Responsum: Intra est, nullum pretium additum, pretium prensoris iam sumptum moderatoris includit.
4. Estne possibile unum digitum movere?
Responsum: Non, pinzae unius digiti adhuc in evolutione sunt, plura cognoscendi causa, quaeso, nostros operarios consule.
5. Quaenam est celeritas operationis Z-EFG-30?
Responsum: Z-EFG-30 0.2secunda pro ictu pleno in unam directionem et 0.4secunda pro itinere circulari sumit.
Negotium Nostrum


Categoriae productorum
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES CG – ...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-80...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-13...
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-50 Paral...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES CG – ...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...