SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Collaborativa Z-EFG-L



Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica

· Celeris aperitio et clausura
· Prehensio in spatio angusto, prehensio rerum fragilium
· Prehensor electricus exclusivus cum cursu 8mm pro brachio robotico sex axium
· Longa vita: decies centena milia cyclorum, ungues aereos superans
· Moderator inclusus: vestigium parvum, integratio facilis
·Modus moderandi: Ingressus et egressus (vel introitus et egressus)
Designatio Specialis pro Brachio Robotico Sex Axium, Prehensore Electrico Ictus 12mm
Coniunge et Lude
Designatio specialis pro brachio robotico sex axium
Alta Frequentia
Brevissimum tempus ictus singularis est tantum 0.2s
Integrata gubernatio et moderator
Systema servo integratum, inserendum et ludendum
Moderator intus est
Spatium parvum occupans, commodum ad integrandum.
Cauda Mutari Potest
Cauda eius mutari potest, ut variis requisitis occurrat.
Mollis Fixatio
Res fragiles prehendere potest

● Revolutionem in substitutione prensarum pneumaticarum prensis electricis promovens, prima prensa electrica cum systemate servo integrato in Sinis.
● Substitutio perfecta compressoris aeris + filtri + valvulae solenoidis + valvulae suffocatoriae + pinzae pneumaticae
● Vita utilis per plures cyclos, congruens cum cylindro Iaponico traditionali




Specificatio Parameter
Z-EFG-L est prehensor electricus roboticus duorum digitorum parallelorum cum vi prehensionis 30N, qui prehensionem mollem sustinet, qualis prehensio ovorum, panis, tuborum mammarum, etc.
| Numerus exemplaris Z-EFG-L | Parametri |
| Ictus totalis | 12mm |
| Vis prehensionis | 30N |
| Repetibilitas | ±0.02mm |
| Pondus prehensionis commendatum | ≤0.5kg |
| Modus transmissionis | Crema rotarum + Dux rotulorum transversalis |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.2secunda |
| Ambitus temperaturae operandi | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80 (Sine pruina) |
| Modus motus | Duo digiti horizontaliter moventur |
| Moderatio ictus | Non Adaptabilis |
| Adaptatio vis premendi | Non Adaptabilis |
| Pondus | 0.4kg |
| Dimensiones (L*L*A*A) | 68*68*113.6mm |
| Collocatio moderatoris | Incorporatus |
| Potestas | 5W |
| Typus motoris | DC sine spazzolis |
| Tensio aestimata | 24V ± 10% |
| Currentis maximi | 1A |
| Bracchium roboticum sex axium adaptabile | UR, Aubo |
Bracchium Roboticum Sex Axium, Coniungere et Uti
Prehensor electricus Z-EFG-L cum brachiis roboticis collaborativis vulgaribus in foro congruere potest, altum gradum protectionis et magnum onus habet.


Integrata gubernatio et moderator
Z-EFG-L est parva prensa electrica systemate servo integrato instructa, ictum 12mm habet, vis premendi 30N est; una Z-EFG-L compressorem aeris + filtrum + valvulam magneticam electronicam + valvulam suffocationis + prensam aeris substituere potest.
Figura Parva, Flexibilis ad Installandum
Magnitudo prehensoris electrici Z-EFG-L est L68*W68*H113.6mm, structura eius compacta est, modos institutionis multiplices sustinet, moderator eius inclusus est, spatium parvum occupans, variis requisitis ad prehensionem facile tractari potest.


Celeritas ad Reagendum, Praecisa Imperium
Brevissimum tempus ictus singularis est 0.45secunda, pars caudae eius facile mutari potest, clientes flexibiles esse possunt ad accommodandum prehensorem electricum secundum necessitates productionis suae.
Diagramma Installationis Dimensionis
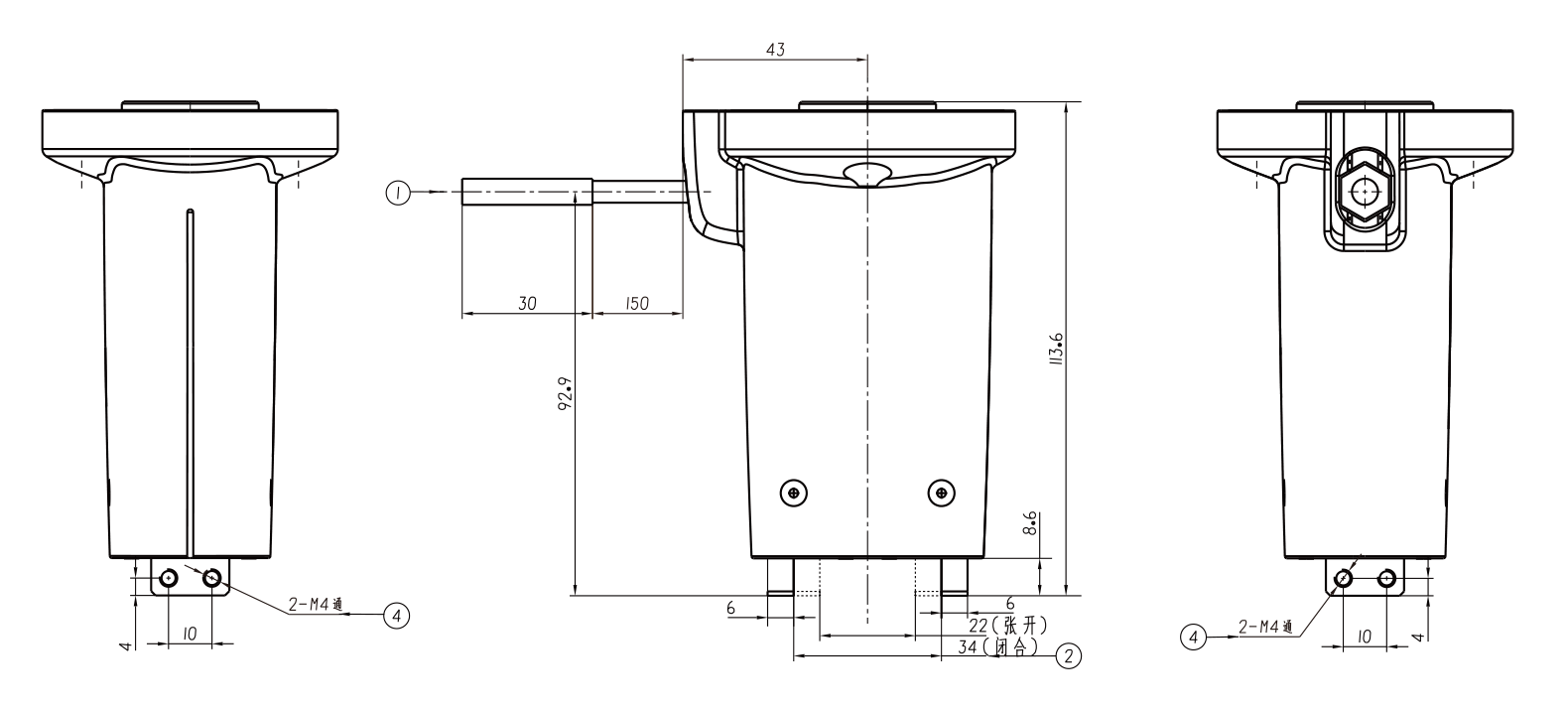
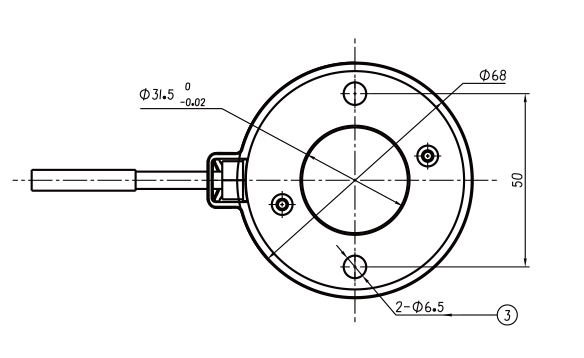
① RKMV8-354 Obturaculum quinque filorum aviationis ad RKMV8-354
② Cursus prehensoris electrici est qwmm
③ In loco institutionis, duabus cochleis M6 utere ad coniungendum cum flange ad finem brachii robotici UR.
④ Locus institutionis, locus institutionis instrumenti (cochlea M6)
Parametri Electrici
Tensio nominalis 24±2V
Current 0.4A

Negotium Nostrum


Categoriae productorum
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C5...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C3...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-ECG-20...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-26 Paral...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES CG – ...