SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Rotativa Z-ERG-20-100




Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Prehensores robotici SCIC seriei Z-EFG parvae magnitudinis sunt cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari potes. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.

Characteristica

·Rotationem infinitam et rotationem relativam sustinet, nullum anulum lubricum, et sumptus sustentationis eius humilis est.
·Celeritas rotationis eius et vis premendi accurate regi possunt.
·Decenas miliones cyclorum habet, quod longam vitam habet, ultra pinzam aëriam.
·Moderator eius inclusus est, qui spatium laboris parvum occuparet, commode ad integrandum.
·Modus Moderationis: Modbus lineam principalem et I/O ad moderandum sustinet.
·Vis prehensionis eius usque ad 100N ascendere potest, momentum rotationis usque ad 1.5Nm.
Ad rotationem infinitam et rotationem relativam sustinendam, nullus anulus lubricus, sumptus sustentationis humilis
Prehensor Rotationis
Sustine rotationem infinitam et rotationem relativam
Imperium Accuratum
Vis rotationis et premendi, frenus, et celeritas accurate regi possunt.
Longa Vita
Decem miliones cyclorum, prementem pneumaticam superant.
Moderator intus constructus est
Cubiculum parvum occupans, commodum ad integrandum.
Modus Moderationis
Sustentatio moderationis Modbus bus-mastering et moderationis I/O
Mollis Fixatio
Vis prehensionis maxima est 100N, momentum rotationis maximum est 1.5Nm.

● Revolutionem in substitutione prensarum pneumaticarum prensis electricis promovens, prima prensa electrica cum systemate servo integrato in Sinis.
● Substitutio perfecta compressoris aeris + filtri + valvulae solenoidis + valvulae suffocatoriae + pinzae pneumaticae
● Vita utilis per plures cyclos, congruens cum cylindro Iaponico traditionali



Specificatio Parameter
| Numerus exemplaris Z-ERG-20-100 | Parametri |
| Ictus totalis | 20mm adaptabilis |
| Vis prehensionis | 30-100N adaptabilis |
| Repetibilitas | ±0.2mm |
| Pondus prehensionis commendatum | ≤1kg |
| Modus transmissionis | Crema et pinna + orbita rotulorum transversa |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.3s |
| Momentum maximum rotans | 1.5 Nm |
| Maxima celeritas rotationis | CLXXX RPM |
| Spatium rotationis | Rotatio infinita |
| Reactio rotans | ±1° |
| Pondus | 1.2 kg |
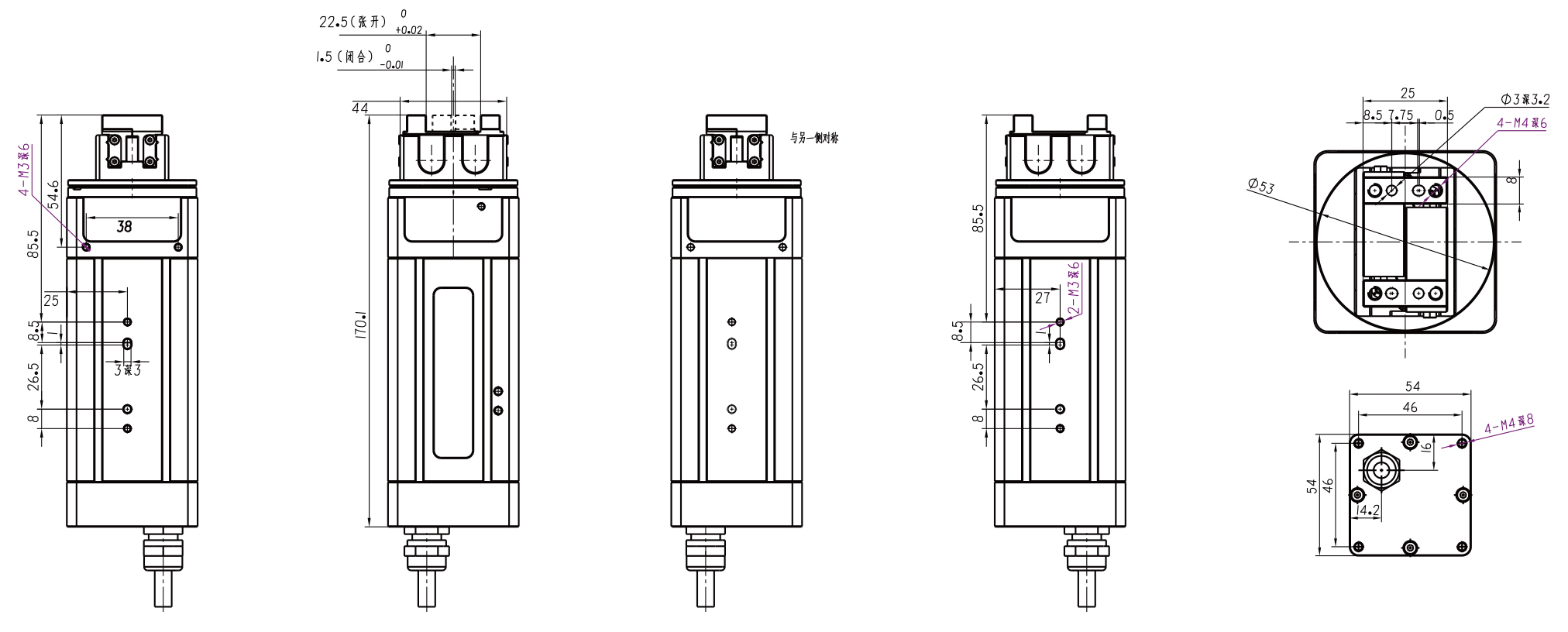
| Dimensiones | 54*54*170mm |
| Tensio operativa | 24V±10% |
| Current aestimatus | 2A |
| Maxima intensitas | 4A |
| Potestas | 50W |
| Classis tutelae | IP20 |
| Typus motoris | Motor servo |
| Ambitus temperaturae operativae | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80 (Sine pruina) |
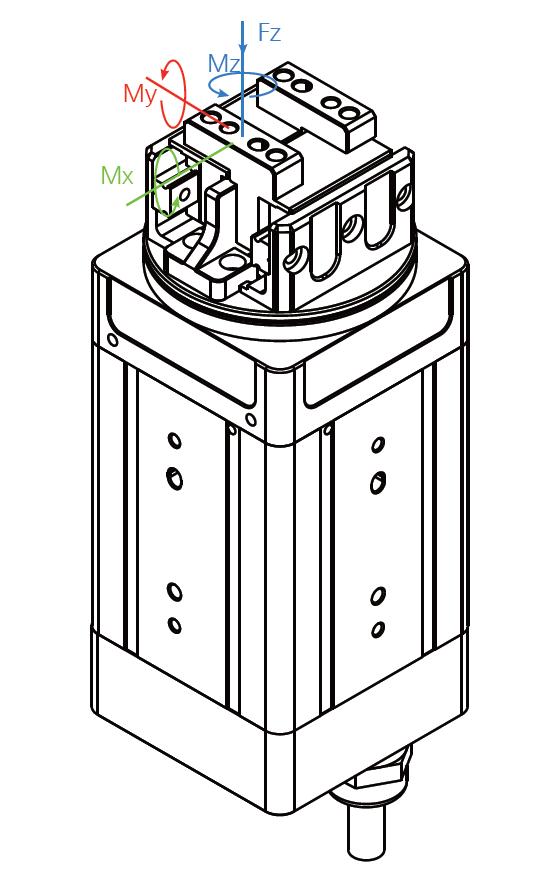
| Onus staticum permissum in directione verticali | |
| Ex: | 150N |
| Momentum torquens permissum | |
| Mx: | 1.6 Nm |
| Meum/Mea: | 1.8 Nm |
| Mz: | 1.6 Nm |
Sine Anulo Labente, Impensa Sustentationis Humilis

Z-ERG-20-100 rotationem infinitam et rotationem relativam sustinet, anulum lubricum non habet, sumptus sustentationis humiles, cursus totalis 20mm est, designum transmissionis specialem et compensationem algorithmi impulsoris adoptavit, vis premendi 30-100N continua ad accommodandum est.

Celeris Reactio, Stabilior

Brevissimus cursus rotationis pinzae tantum 0.3s est, momentum rotationis maximum 1.5Nm, celeritas rotationis maxima 180RPM est, rotationem infinitam sustinet, et repetibilitas ±0.2mm est.
Figura parva, commoda ad interportam

Magnitudo Z-ERG-20-100 est L 54*L 54*H 174mm, pondus 1.2kg, gradus protectionis IP20, structura compacta, spatium parvum occupans, facile multis petitionibus pro officiis rotationis prehendendae satisfacere potest.


Impulsus et Imperium Integratum, ad Mollem Clausuram Sustentandam

Cauda eius premens facile mutari potest, clientes res secundum desideria sua prehendere possunt, partem caudae prementis designare, et pinza electrica motum premens perficere posse servare.
Modi Moderationis Multiplicati, Facile Operandum

Configuratio prensoris Z-ERG-20-100 simplex est, moderator eius inclusus est, spatium parvum occupat, facile integratur, et moderationem Moddbus bus-mastering et moderationem I/O sustinet.

Centrum Gravitatis Oneris Aberrans
Negotium Nostrum


Categoriae productorum
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-13...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

Prehensor Roboticus Collaborativus – SFG Soft Fi...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-ECG-20...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

SERIES MODULORUM PRESSORIORUM – FPT Duorum Digitorum T...