SERIES PRESSORIUM ELECTRICORUM HITBOT – Pressa Electrica Rotativa Z-ERG-20




Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
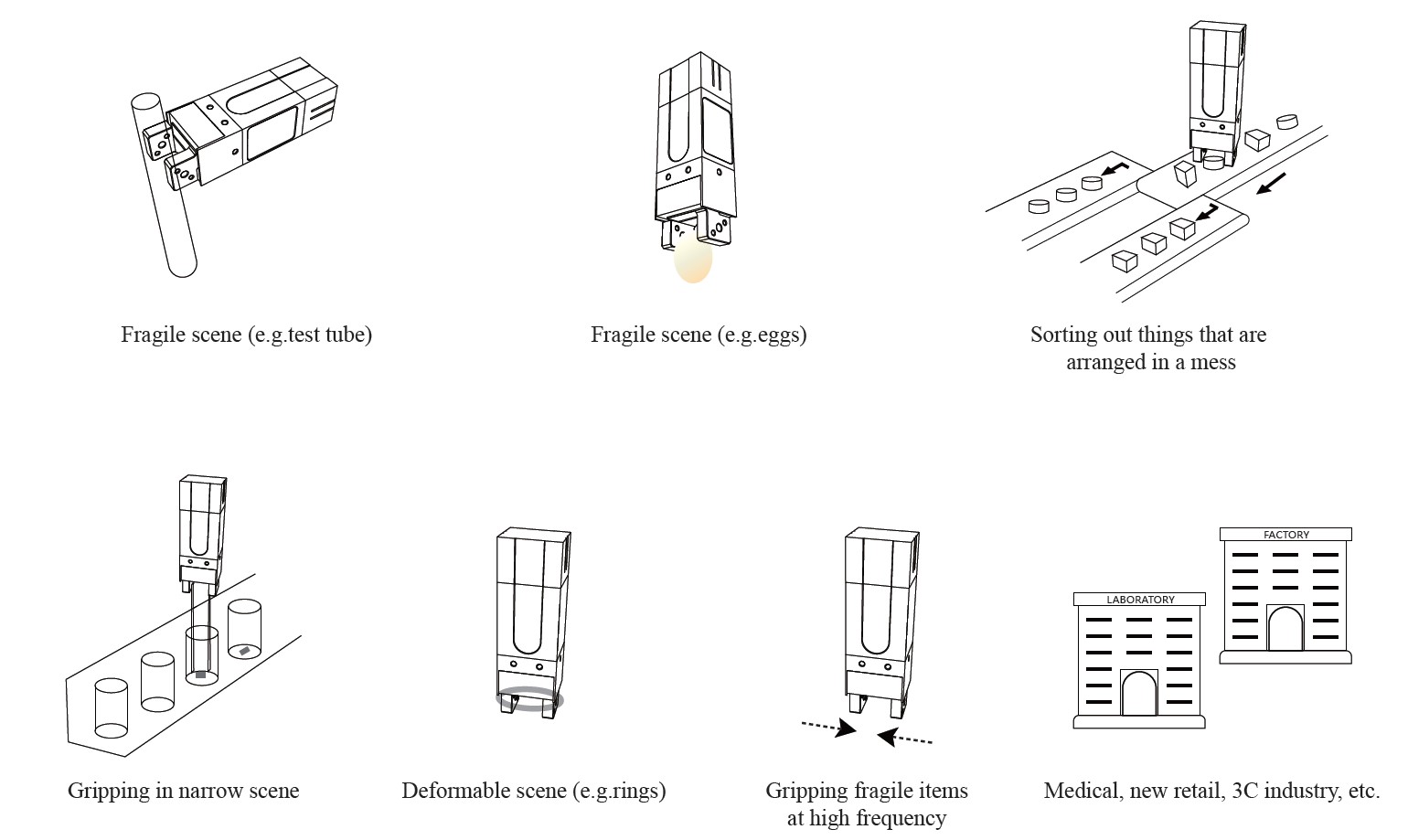
Applicatio
Prehensores robotici SCIC seriei Z parvae magnitudinis sunt, cum systemate servo incluso, quo celeritas, situs, et vis prehensionis accurata moderari licet. Systema prehensionis SCIC recentissimum ad solutiones automationis destinatum tibi novas possibilitates ad automatizandas opera aperiet quas numquam possibiles putasti.
Characteristica

· Rotationem infinitam et rotationem relativam sustinet, anulus lubricus non labens, sumptus sustentationis humilis
· Vis rotationis et prehensionis, positio et celeritas accurate regi possunt
· Longa vita utilis, cycli multiplices, melior effectus quam pinza prenumatica
· Moderator inclusus: spatium parvum occupat et facile integratur
· Modus moderandi: moderationem Modbus bus et I/O sustinet



Specificatio Parameter
Manipulator Z-ERG-20 facile cum hominibus tractatur et prehensionem mollem sustinet. Prehensor electricus valde integratus est et multa commoda habet:
●Rotationem infinitam et rotationem relativam sustinet, nullus anulus lubricus, sumptus sustentationis humilis.
●Rotatio, vis premens, terebra, et celeritas accurate regi possunt.
●Longa vita: decies centena milia circulorum, melior quam compressores aëris.
●Moderator inclusus, ad spatium conservandum, facile integratur.
●Modus moderationis: Modbus et moderationem I/O sustinet.
| Numerus exemplaris Z-ERG-20 | Parametri |
| Ictus totalis | 20mm adaptabilis |
| Vis prehensionis | 10-35N adaptabilis |
| Repetibilitas | ±0.2mm |
| Pondus prehensionis commendatum | ≤0.4kg |
| Modus transmissionis | Crema rotarum + Dux linearis |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.20s |
| Momentum maximum rotans | 0.3 Nm |
| Maxima celeritas rotationis | 240 RPM |
| Spatium rotationis | Rotatio infinita |
| Reactio rotans | ±1° |
| Pondus | 1.0kg |
| Dimensiones | 54*54*141mm |
| Tensio operativa | 24V±10% |
| Current aestimatus | 1.5A |
| Maxima intensitas | 3A |
| Potestas | 50W |
| Classis tutelae | IP20 |
| Typus motoris | Motor servo |
| Ambitus temperaturae operativae | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80 (Sine pruina) |
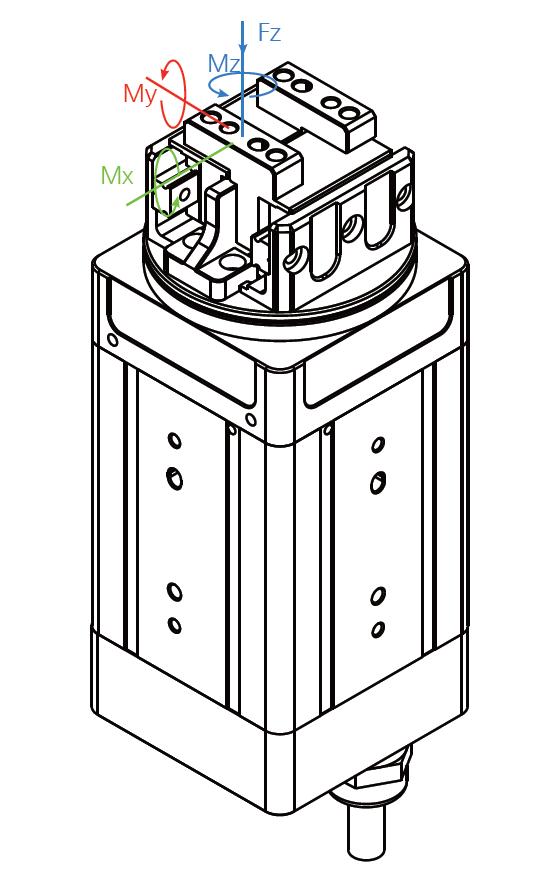
| Onus staticum permissum in directione verticali | |
| Ex: | 100N |
| Momentum torquens permissum | |
| Mx: | 1.35 Nm |
| Meum/Mea: | 0.8 Nm |
| Mz: | 0.8 Nm |
Centrum Gravitatis Oneris Aberrans
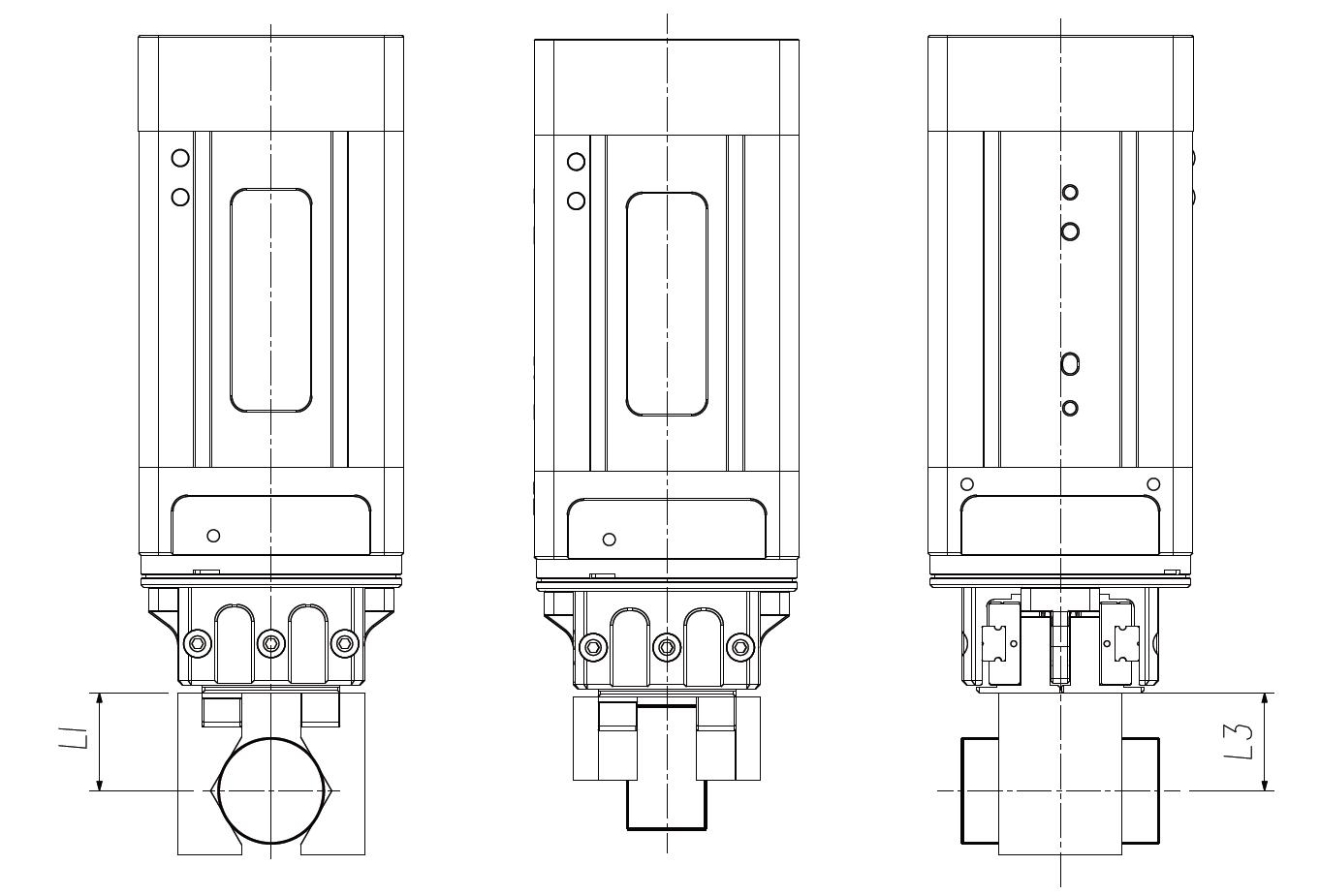
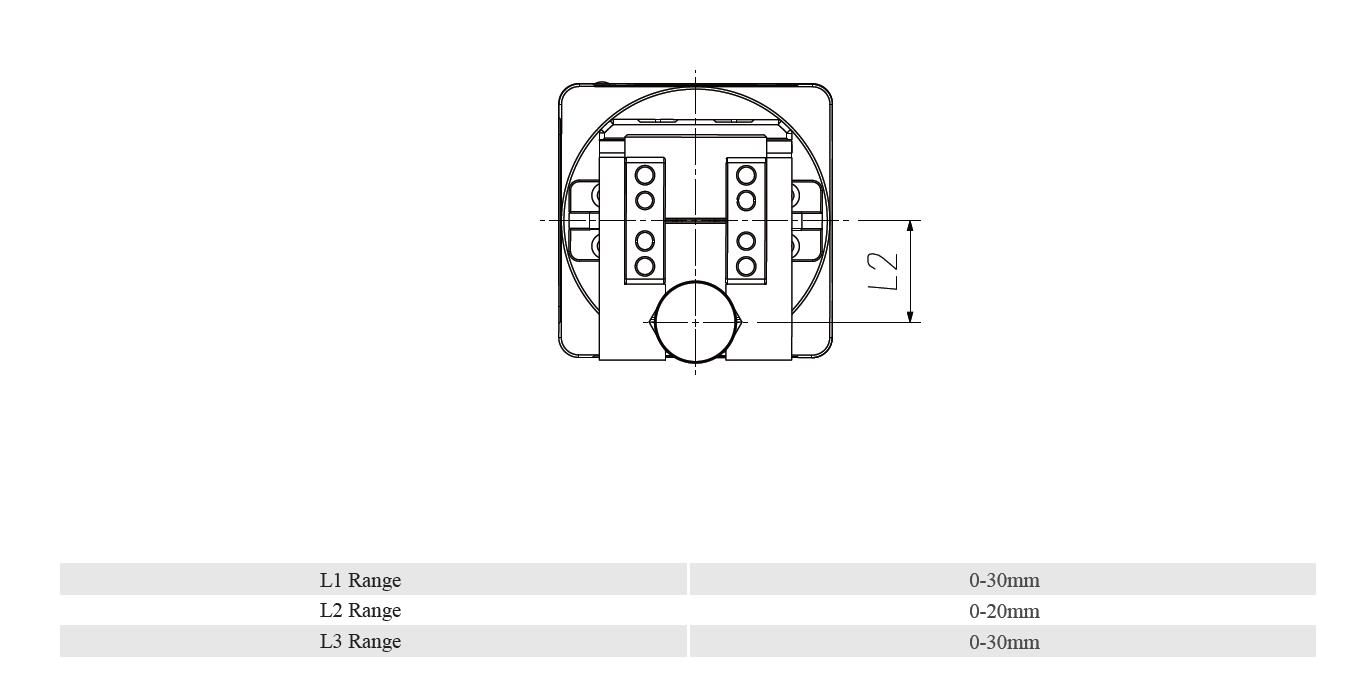
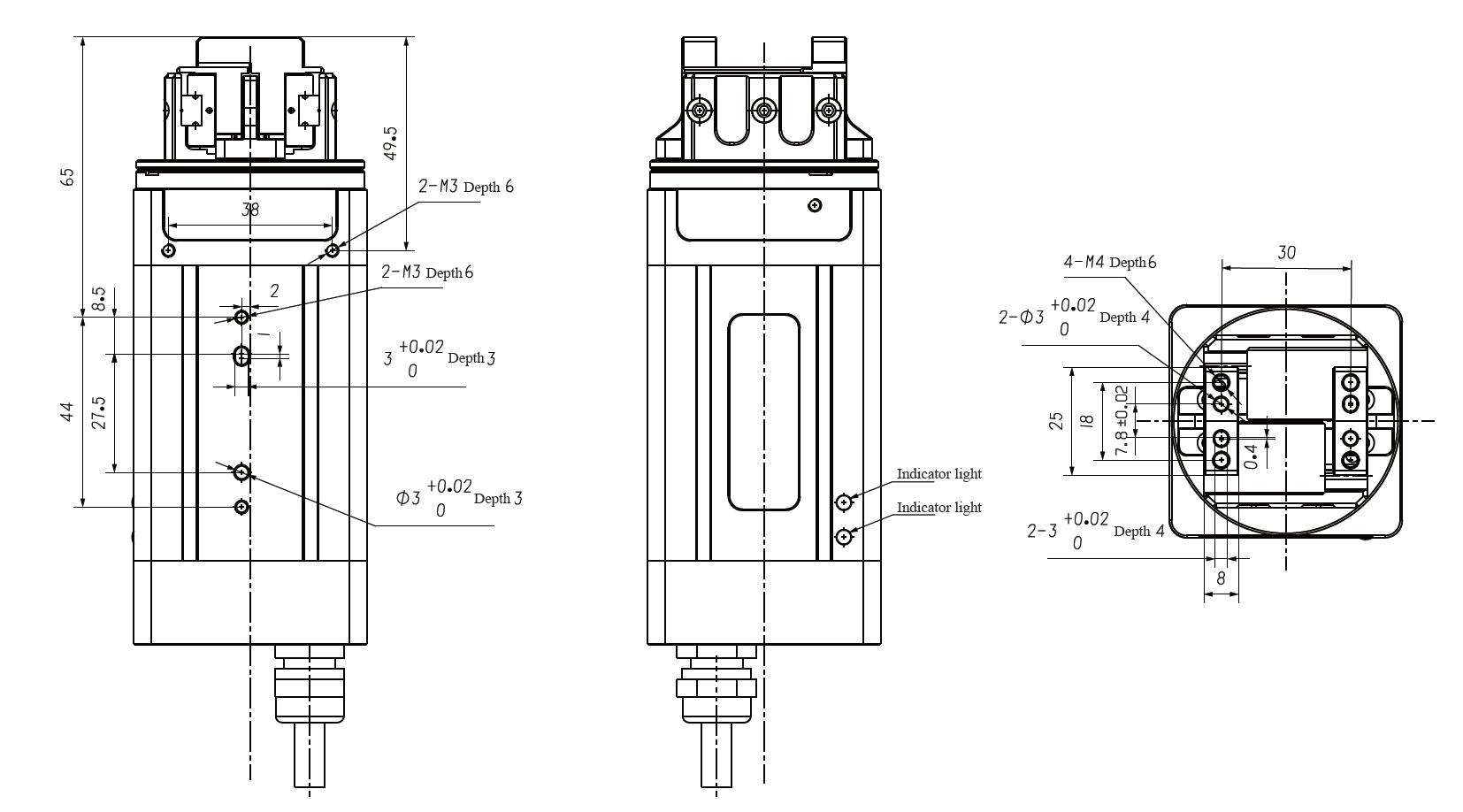
Diagramma Installationis Dimensionis
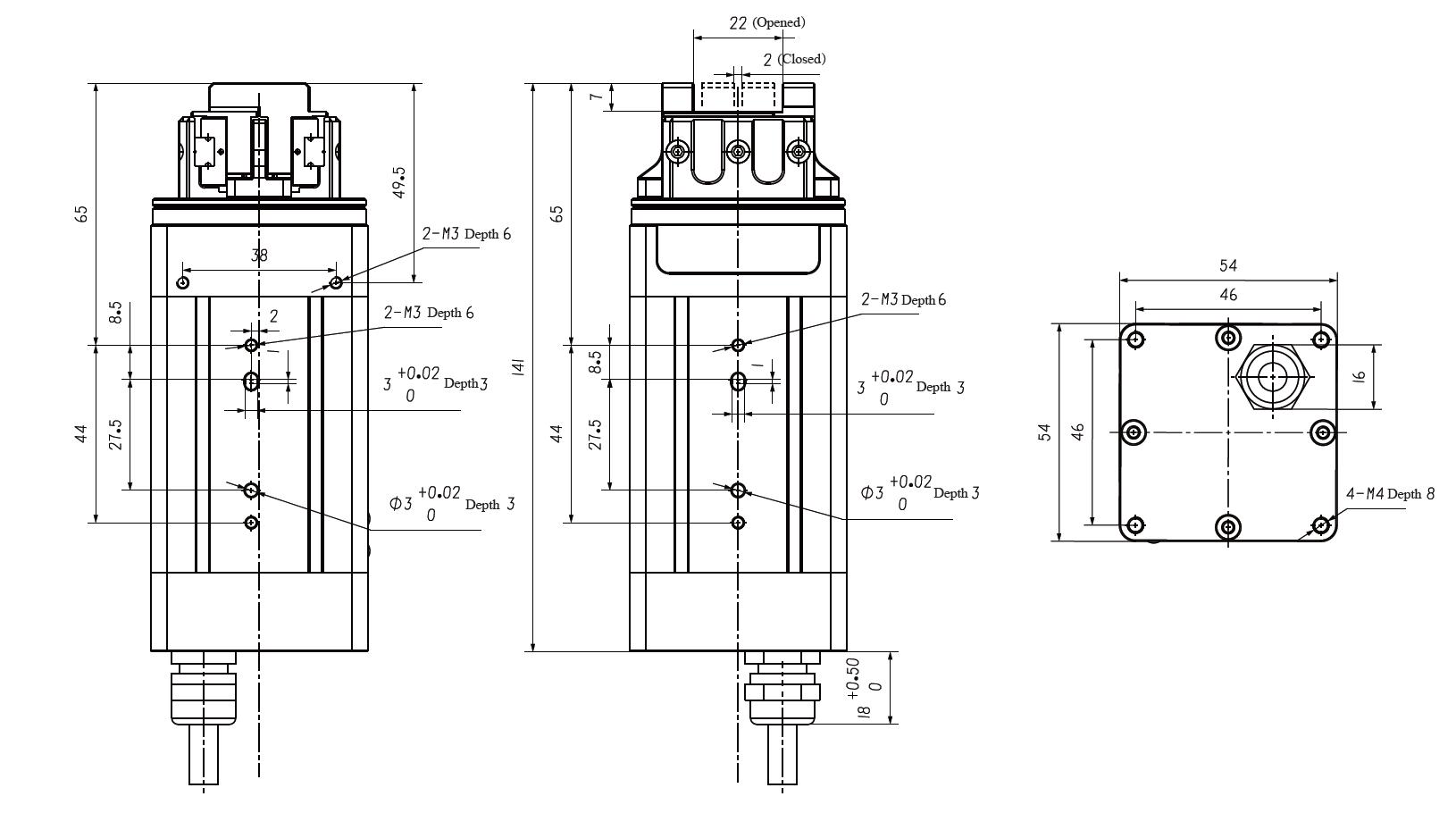
① RKMV8-354 Obturaculum quinque filorum aviationis ad RKMV8-354
② Cursus prehensoris electrici 20mm est.
③ In loco institutionis, duabus cochleis M6 utere ad coniungendum cum flange ad finem brachii robotici UR.
④ Locus institutionis, locus institutionis instrumenti (cochlea M6)
⑤ Situs institutionis, positio institutionis instrumenti (tria foramina cylindrica clavi)
Negotium Nostrum


Categoriae productorum
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-40...
-

SERIES MODULORUM PRESSORIORUM – FPT Tridigitalis...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EMG-4 Parall...
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-20 Paral...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C5...
-

DH ROBOTICS SERVO ELECTRICA PRESSORA SERIES PGE –...