BRACHIA ROBOTICA SCARA – Bracchium Roboticum Collaborativum Z-Arm-4160B





Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
Cobots SCIC Z-Arm sunt leves roboti collaborativi quattuor axium cum motore impulsorio intus incluso, et iam non requirunt reductores sicut alii SCARA traditionales, sumptum 40% reducendo. Cobots SCIC Z-Arm functiones perficere possunt, inter quas (sed non limitatas ad) impressionem tridimensionalem, tractationem materiarum, soldaduram, et sculpturam lasericam. Efficientiam et flexibilitatem operis et productionis tuae magnopere augere possunt.
Proprietates

Alta Praecisio
Repetibilitas
±0.02mm
Axis Z personalizatus
0.1-0.8m
Magnum Onus Utile
Sta 4kg
Maximus 5 kg
Celeritas Maior
Celeritas linearis maxima 2m/s
(Ponus stativi 5kg)
Bracchium Magnum, Bracchium Roboticum Quadriaxiale Altae Praecisionis, Facile Usu
Alta Praecisio
Repetibilitas: ±0.02mm
Spatium Brachii Magni
Axis J1: 325mm,Axis J2: 275mm
Axis Z personalizatus
Ictus sursum-deorsum inter 0.1m et 0.8m aptari potest.
Spatium Servans
Impulsor/Moderator Intra Est
Simplex et Facile ad Usum
Advena qui bracchium roboticum nesciebat etiam facile adhiberi potest, interfacie aperiente.
Alta Velocitas
Celeritas eius est 2000mm/s sub onere 4kg.

Producta Similia



Specificatio Parameter
SCIC Hitbot Z-Arm 4160B a SCIC Tech designatus est; est robot collaborativus levis, facile programmatu et usu, SDK sustinens. Praeterea, detectionem collisionum sustinet, scilicet, automatice sistet cum hominem tangit, quod est collaboratio hominis-machinae callida, securitas alta.
| Bracchium roboticum collaborativum Z-Arm 4160B | Parametri |
| Longitudo brachii unius axis | 325mm |
| Angulus rotationis 1 axis | ±90° |
| Longitudo brachii duorum axium | 275mm |
| Angulus rotationis duorum axium | ±164° (facultativum): 15-345° |
| Ictus axis Z | Altitudo 410 aptari potest |
| Spatium rotationis axis R | ±1080° |
| Celeritas linearis | 2000 mm/s (onus utile 4 kg) |
| Repetibilitas | ±0.02mm |
| Sarcina ordinaria | 4kg |
| Maxima sarcina utilis | Quinque chiliogrammata |
| Gradus libertatis | 4 |
| Fons potentiae | 220V/110V 50-60HZ aptatur ad potentiam maximam 48VDC 960W |
| Communicatio | Aethernet |
| Expansio | Moderator motus integratus 24 I/O + expansionem sub brachio praebet. |
| Axis Z in altitudine adaptari potest | 0.1m~0.8m |
| Doctrina trahendi axis Z | / |
| Interfacies electrica reservata | Configuratio ordinaria: fila 24*23awg (non munita) e tabula receptaculi per operculum brachii inferioris Optionale: 2 tubi vacui φ4 per tabulam socketi et flangem |
| Pincipulae electricae HITBOT compatibiles | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Lucem spirans | / |
| Ambitus motus brachii secundi | Norma: ±164° Optionalis: 15-345° |
| Accessiones optionales | / |
| Utere ambitu | Temperatura ambientis: 0-45°C Humiditas: 20-80% RH (sine pruina) |
| Ingressus digitalis portus I/O (segregatus) | Extensio antebrachii 9+3+ (facultativa) |
| Egressus digitalis portus I/O (segregatus) | Extensio antebrachii 9+3+ (facultativa) |
| Ingressus analogicus portus I/O (4-20mA) | / |
| Egressus analogicus portus I/O (4-20mA) | / |
| Altitudo brachii robotici | 860mm |
| Pondus brachii robotici | Pondus netum 36.5kg, cursus 410mm |
| Magnitudo basis | 250mm * 250mm * 15mm |
| Distantia inter foramina fixationis basis | 200mm*200mm cum quattuor cochleis M8*20 |
| Detectio collisionum | √ |
| Doctrina trahendi | √ |
Optima Selectio ad Munera Leviora Compositionis
Bracchium roboticum Z-Arm XX60B est bracchium roboticum quadriaxiale magna extensione, aream parvam occupans, aptissimum ad stationem laboris vel intra machinam ponendum; electio idealis est ad opera leviora congregationis.


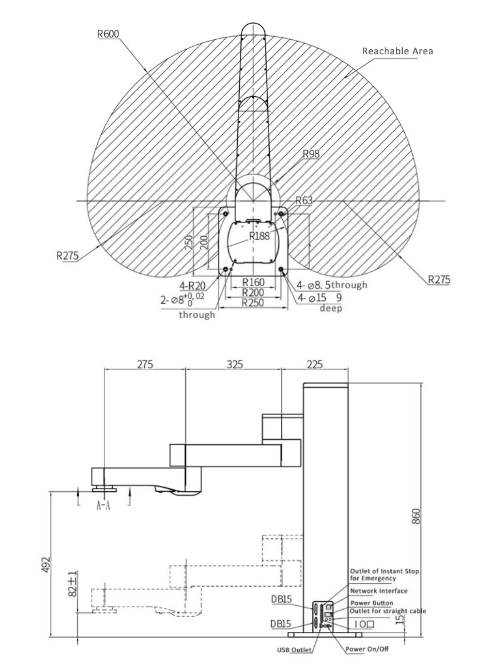
Levis cum Magno Angulo Rotationis

Pondus producti est circiter 36.5 kg, onus maximum usque ad 5 kg ascendere potest, angulus rotationis axis 1 est ±90°, angulus rotationis axis 2 est ±164°, et amplitudo rotationis axis R usque ad ±1080° pertingere potest.
Magna Spatium Brachii, Lata Applicatio

Bracchium Z XX60B longam latitudinem habet, longitudo unius axis 325mm, longitudo duorum axium 275mm est, celeritas linearis eius usque ad 2000mm/s sub onere 4kg ascendere potest.


Flexibilis ad disponendum, celeris ad mutandum
Z-Arm XX60B habet proprietates leves, spatium conservantes, et flexibiles in usu; aptus est ad usum in multis applicationibus, nec priorem ordinationem productionis mutat, inter quas celeritas ad seriem processus commutandam et parvas series productionis perficiendas, et cetera.
DragTeaching ad Complete Program

Programma in designio graphico fundatur; punctum, signum exitus, prementem electricam, alveum, moram, subprocessum, repositionem, aliaque modula functionum fundamentalium praebuit; usores modulum trahere possunt ad bracchium roboticum in area programmandi regendum; interfacies simplex est, functio autem potens.
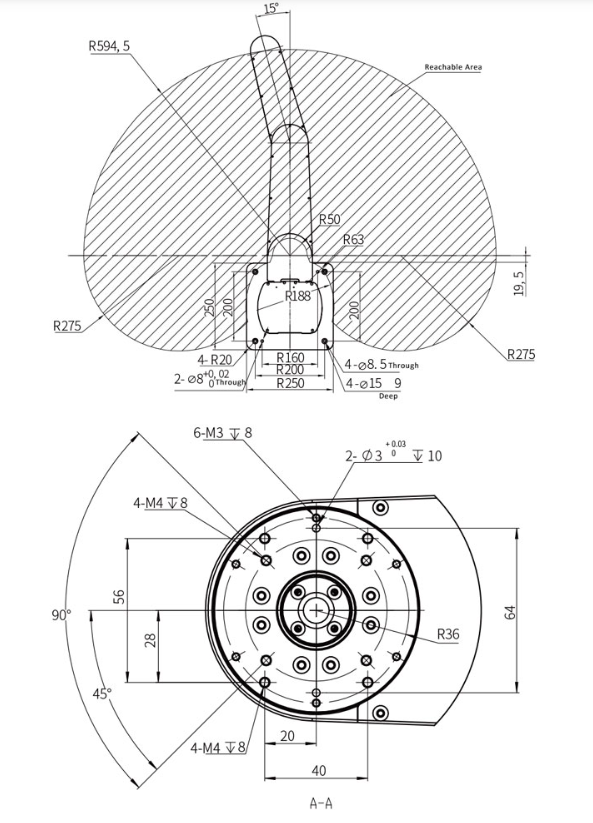
Ambitus Motus Versio M1 (Extrorsum Rotatio)
Coniunctor DB15 commendatus

Exemplar commendatum: Mas inauratus cum testa ABS YL-SCD-15M Femina inaurata cum testa ABS YL-SCD-15F
Descriptio magnitudinis: 55mm * 43mm * 16mm
(Vide figuram V)
Diagramma Ambitus Usus Externi Brachii Robotici

Negotium Nostrum


Categoriae productorum
-

SERIES CELERIS MUTATIONIS – QC-150 Rotunda Manualis...
-

AUTOMATORES ELEVATORII – Automata Elevatoria Rotativa SJV...
-

CARRUCA ELEVATRICIS INTELLIGENS – SFL-CDD14-CE Laser SLAM ...
-

Series Robotarum Intelligentiae Artificialis TM – Robot Intelligentiae Artificialis Sex Axium TM12M
-

Series Robotarum Intelligentiae Artificialis TM – Robot Intelligentiae Artificialis Sex Axium TM16M
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-30 Paral...