Compositio Pretii Vilis, Paletizationis, Politurae, Spargendi, Tractationis, Soldaturae Inverteris, Sectio Flammae, Bracchium Roboticum Automaticum Industriale Sex Axium
Compositio Pretii Vilis, Paletizationis, Politurae, Spargendi, Tractationis, Soldaturae Inverteris, Sectio Flammae, Bracchium Roboticum Automaticum Industriale Sex Axium
Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio
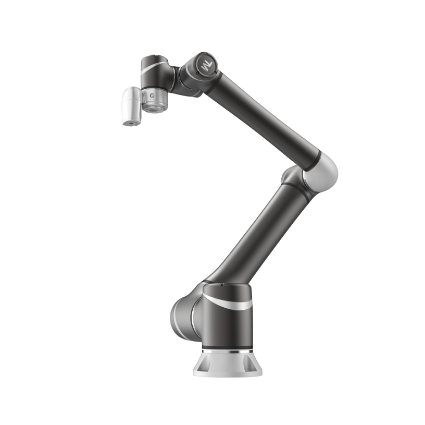
TM12 longissimum extensionem in serie nostra robotica habet, operationem collaborativam permittens, etiam in applicationibus quae praecisionem et facultates elevationis ad gradum industrialem requirunt. Plures proprietates habet quae permittunt ut tuto prope operarios humanos adhibeatur, et sine necessitate imponendi magnas saepta vel saepta. TM12 optima electio est pro automatione robotica coniuncta ad flexibilitatem augendam et augendam.productivitas.
Systemate visionis praestantissimo, technologia intellegentiae artificialis provecta, securitate completa, et operatione facili,Intellegentia artificialis collaborativa negotium tuum longius quam umquam educet.Automationem ad gradum superiorem evehe augendo productivitatem, qualitatem emendando, et sumptus minuendo.
Proprietates
CALLIDIUS
Cobot Tuum per Intellegentiam Artificialem (IA) in Futurum Tutum Praepara
• Inspectio optica automatica (AOI)
• Qualitatis cura et constantia
• Efficientiam productionis auge
• Sumptus operandi minuere
SIMPLEX
Nulla experientia requiritur
• Interfacies graphica ad facilem programmandi usum
• Ordo operis emendationis ad processum ordinatus
• Manus simplex gubernans ad positiones docendas
• Calibratio visualis celeris cum tabula calibrationis
TUTUS
Salus collaborativa nostra prioritas est.
• Congruit cum ISO 10218-1:2011 et ISO/TS 15066:2016
• Detectio collisionis cum sistendo in casu necessitatis
• Sumptus et spatium pro saepis et saepimentis serva.
• Limites celeritatis in spatio laboris collaborativo constitue.
Cobots, qui intellegentia artificiali utuntur, praesentiam et orientationem ambitus sui et partium agnoscunt, ut inspectiones visuales et dynamica opera "pick-and-place" perficiant. Intellegentiam artificialem ad lineam productionis sine labore adhibe et productivitatem auge, sumptus minue, et tempora cycli brevia. Visio intellegentiae artificialis etiam eventus e machinis vel instrumentis probationis legere et decisiones congruas proinde facere potest.
Praeter emendationem processuum automationis, robot collaborativus ab intelligentia artificiali ductus notitias in productione vestigare, resolvere et integrare potest, ut vitia vitet et qualitatem producti augeat. Automationem officinae tuae facile auge cum apparatu completo technologiae intelligentiae artificialis.
Nostri roboti collaborativi systemate visionis integrato instructi sunt, quod robotis collaborativis facultatem praebet circumstantias suas percipiendi, quod facultates robotorum collaborativorum insigniter auget. Visio robotica, sive facultas "videndi" et interpretandi data visualia in mandata mandatorum, una est ex proprietatibus quae nos superiores reddit. Res ipsas mutat ad accurate peragenda officia in spatiis laboris dynamicis et mutantibus, operationes faciliores reddendo, et processus automationis efficaciores reddendo.
Utentibus novis destinatum, scientia programmandi non est necessaria ad incipiendum cum AI Cobot. Motus intuitivus "clicca et trahe" utens programmate nostro programmandi fluxus complexitatem minuit. Nostra technologia patentata operatoribus sine experientia programmandi permittit ut proiectum tam breve quam quinque minutas programent.
Sensoria securitatis insita robotem AI Cobot sistent cum contactus physicus detegitur, damnum potentiale minuentes pro ambitu sine pressione et tuto. Etiam limites celeritatis pro roboto constituere potes ut in variis condicionibus iuxta operarios tuos adhiberi possit.
Producta Similia



Novissimam nostram innovationem in automatione industriali praesentamus - bracchium roboticum industriale autonomum decem chiliogrammatum oneris. Hoc bracchium roboticum modernissimum destinatum est ad modum quo opera soldadurae, secandi et purgandi in ambitu industriali perficiuntur revolutionandum. Cum suis facultatibus et praecisione provectis, bracchium roboticum efficacitatem, productivitatem et qualitatem processus fabricationis insigniter augebit.
Technologia modernissima instructum, bracchium roboticum onera usque ad 10 kg ferre potest et ad amplam varietatem applicationum industrialium aptum est. Sive partes metallicas conglutinat, sive materias accurate secat, sive superficies accurate purgat, hoc bracchium roboticum praebet excellentem efficaciam et firmitatem.
Inter praecipua commoda brachii robotici est operatio eius automatica, quae necessitatem interventionis manualis minuit, ita periculum erroris humani imminuens et salutem in loco laboris augens. Magna eius accuratio et repetibilitas eventus constantes praestant, unde qualitas producti emendata et summa pecuniae compendia oriuntur.
Praeterea, brachii robotici designatio compacta et optiones versatiles adfigendi permittunt facile integrari in ambitus fabricatorios existentes, ita ut cum aliis machinis et instrumentis sine intermissione operetur. Interfacies eius facilis usu et facultates programmandi intuitivae te adiuvant ut facile officia secundum necessitates productionis tuae specificas constituas et adaptes.
Praeterea, bracchium roboticum ad usus industriales asperitates tolerandas designatum est, cum constructione durabili et functione certa ad operationem diuturnam curandam. Eius parvae curae necessitates et longum tempus operationis ulterius augent eius sumptus efficaciam et propositionem utilitatis pro negotiis.
Summa summarum, bracchium roboticum industriale decem chiliogrammatum oneris affert momentum in automatione industriali, facultates incomparabiles ad opera sudandi, secandi et purgandi offerens. Praecisio, efficacia et fides eius id commodum pretiosum faciunt fabricatoribus qui processus suos expedire et in foro hodierno competitivo anteire volunt. Experire futurum automationis industrialis cum bracchiis nostris roboticis novissimis.
Specificatio Parameter
| Modellum | TM12M | |
| Pondus | 32.8 kg | |
| Onus Maximum | Duodecim chiliogrammata | |
| Attingere | 1300mm | |
| Intervallum Articulorum | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±166° | |
| Celeritas | J1, J2 | 120°/s |
| J3 | CLXXX°/secunda | |
| J4 | CLXXX°/secunda | |
| J5 | CLXXX°/secunda | |
| J6 | CLXXX°/secunda | |
| Celeritas Typica | 1.3m/s | |
| Celeritas Maxima | 4m/s | |
| Repetibilitas | ± 0.1mm | |
| Gradus libertatis | Sex articulationes rotationis | |
| Introitus/Egressus | Arca moderatrix | Ingressus digitalis: 16 Egressus digitalis: 16 Ingressus analogus: 2 Exitus analogus: 1 |
| Instrumentum Conn. | Ingressus digitalis: 4 Egressus digitalis: 4 Ingressus analogus: 1 Exitus analogus: 0 | |
| Fons Potentiae I/O | 24V 2.0A pro arca moderatrice et 24V 1.5A pro instrumento | |
| Classificatio IP | IP54 (Bracchium Roboticum); IP32 (Arca Moderatoria) | |
| Consumptio Energiae | Typica 300 vatta | |
| Temperatura | Automatum in intervallo temperaturae 0-50℃ operari potest. | |
| Munditia | Classis ISO 3 | |
| Fons Potentiae | 22-60 VDC | |
| Interfacies I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Communicatio | RS232, Ethemet, Modbus TCP/RTU (dominus et servus), PROFINET (Optionale), EtherNet/IP (Optionale) | |
| Ambitus Programmandi | TMflow, in diagrammate fluxus fundatum | |
| Certificatio | CE, SEMI S2 (Optio) | |
| Intellegentia Artificialis et Visio*(1) | ||
| Functio Intellegentiae Artificialis | Classificatio, Detectio Obiectorum, Segmentatio, Detectio Anomaliae, OCR Intelligentiae Artificialis | |
| Applicatio | Positio, Lectio Codicis Striati 1D/2D, OCR, Detectio Vitiorum, Mensura, Inspectio Coniunctionis | |
| Accuratio Positionis | Positio bidimensionalis: 0.1mm*(II) | |
| Oculus in Manu (Inclusus) | Camera colorata automatice focalizata cum resolutione 5M, distantia operativa 100mm ~ ∞ | |
| Oculus ad Manum (Optionale) | Sustinet maximam duas cameras GigE 2D vel unam cameram GigE 2D + unam cameram 3D*(3) | |
| *(1)Brachia robotica visionis inclusae TM12X, TM14X, TM16X, TM20X etiam non praesto sunt. *(2)Data in hac tabula a laboratorio TM mensurata sunt et distantia operandi est 100 mm. Notandum est in applicationibus practicis valores pertinentes differre posse ob factores ut fontem lucis ambientis in situ, proprietates obiecti, et modos programmandi visionis qui mutationem in accuratione afficient. *(3)Vide locum interretialem officialem TM Plug & Play pro exemplaribus camerarum cum TM Robot congruentibus. | ||
Negotium Nostrum


Categoriae productorum
-

Venditor Sinensis Magnae Efficientiae Quadriaxialis Palletizator...
-

Compositio Pretii Vilis, Paletizatione, Politura, Spr...
-

Bracchium Roboticum Collaborativum 3kg Onus Utile ad...
-
Optima Pretio Moderato, Pretio Vili, Alta Praecisione, 5kg Solvenda...
-

Manipulator Roboticus Collaborativus Szgh-Arm 2442co...
-
Sex Axium Robot Collaborativus Manus Robot Tractans...