SERIES MUTATIONIS CELERIS – QCA-S350 Instrumentum Mutationis Celeris in Fine Robotis


Categoria Primaria
Mutator Instrumentorum Roboticus / Mutator Instrumentorum Extremitatis Brachii (EOAT) / Systema Mutationis Celeris / Mutator Instrumentorum Automaticus / Interfacies Instrumentorum Robotica / Latus Roboticum / Latus Prehensoris / Flexibilitas Instrumentorum / Emissio Celeris / Mutator Instrumentorum Pneumaticus / Mutator Instrumentorum Electricus / Mutator Instrumentorum Hydraulicus / Mutator Instrumentorum Praecisionis / Mechanismus Clausurae Securitatis / Effector Extremitatis / Automatio / Efficacia Mutationis Instrumentorum / Permutatio Instrumentorum / Automatio Industrialis / Instrumenta Extremitatis Brachii Robotica / Designatio Modularis
Applicatio
Instrumenta Extrema Brachii (seu EOAT, per "End-of-Arm Tooling") late adhibentur in industriis ut fabricatione autocinetica, electronica tri-componentia (3C), logistica, formatione iniecta, involucro ciborum et pharmaceuticarum, et tractatione metallorum. Inter functiones praecipuas sunt tractatio partium, soldadura, sparsio, inspectio, et mutatio instrumentorum rapida. EOAT efficacitatem productionis, flexibilitatem, et qualitatem producti insigniter auget, ita ut pars essentialis automationis industrialis modernae sit.
Characteristica
Alta praecisione
Latus pistonis, qui pistorem regulat, munus positionis agit, quod magnam repetitionem positionis accuratam praebet. Experimenta per decies centena milia cyclorum ostendunt accuratam actualem valorem commendatum multo maiorem esse.
Altae fortitudinis
Piston claudens cum magno diametro cylindri validam vim claudendi habet, instrumentum celeris extremitatis roboticae SCIC validam facultatem anti-momentum habet. Cum clauditur, nulla tremor erit propter motum celerem, ita defectum claudendi vitans et accuratam positionem repetitam confirmans.
Alta efficacia
Mechanismus claudendi cum designo superficiei multiconicae, componentibus obturantibus diuturnis, et specillo contactus elastico altae qualitatis adhibiti sunt ad contactum artum moduli signalis curandum.



Specificatio Parameter
| Series Mutationis Celeris | ||||
| Modellum | Maxima onus | Accuratio repetibilitatis (X, Y et Z) | Vis claudendi @ 80Psi (5.5Bar) | Pondus producti |
| QCA-S350 | 350 chiliogrammata | ±0.015mm | 31000N | 9.4 chiliogrammata |

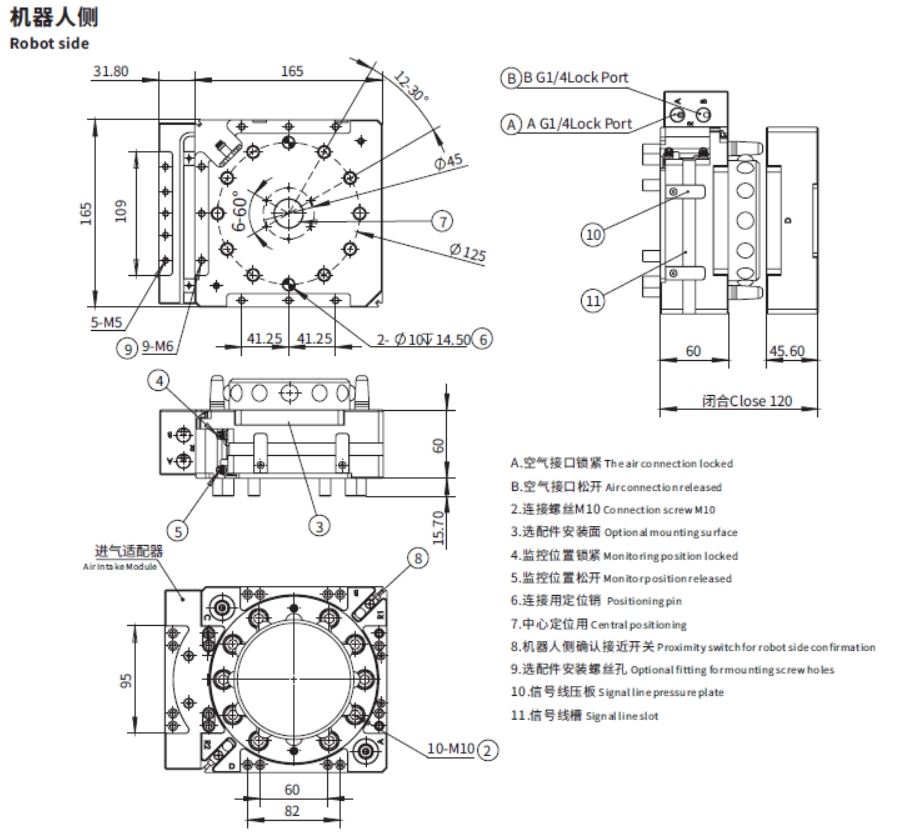
Latus roboticum

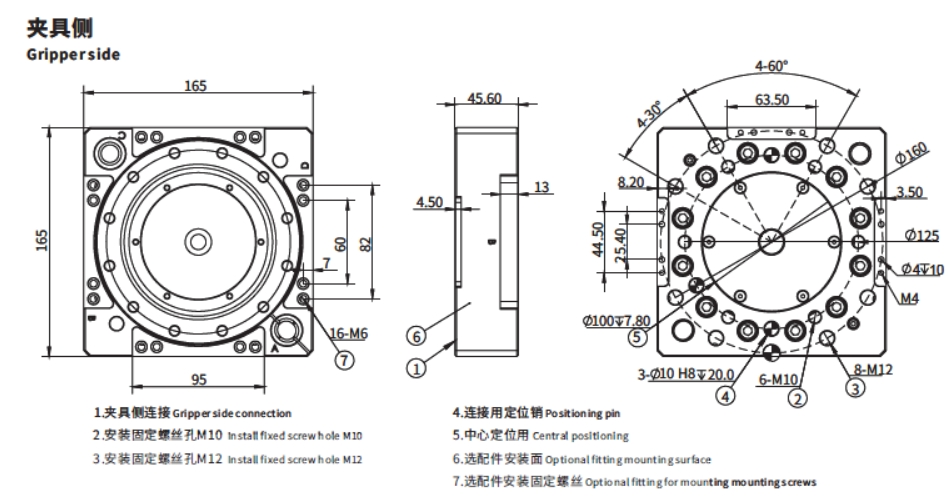
Latus prehensoris
Modulus Applicabilis
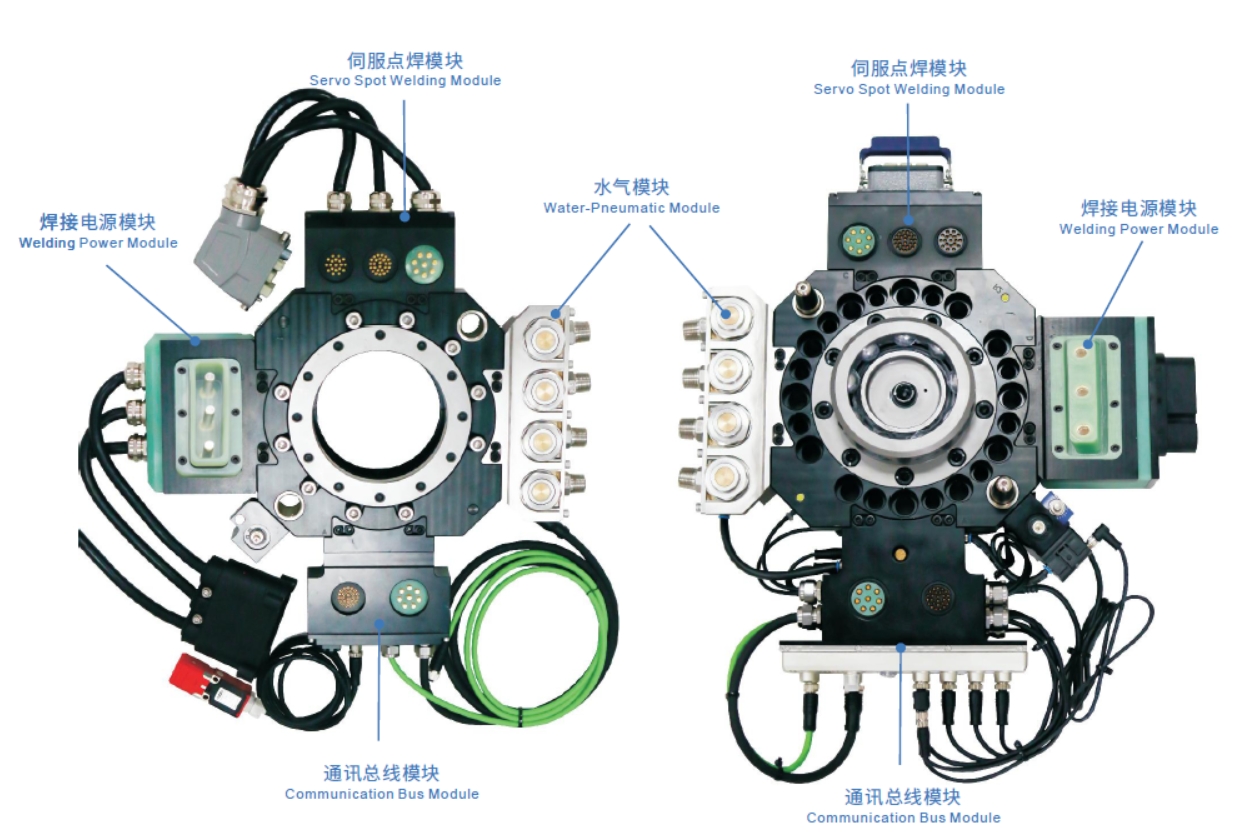
Modulus Potentiae Soldandi
| Nomen Producti | Modellum | PN |
| Modulus Potentiae Soldandi lateris robotici | QCSM-03R | 7.Y02069 |
| Modulus Potentiae Soldandi Lateris Prehensoris | QCSM-03G | 7.Y02070 |
Modulus Extensionis Pneumaticae
| Nomen Producti | Modellum | PN |
| Modulus Extensionis Pneumaticae a latere robotico autoproclamatus | QCAM-08G38R | 7.Y02051 |
| Modulus Extensionis Pneumaticae a latere prehensoris autoproclamatus | QCAM-08G38G | 7.Y02052 |
Modulus Viae Aquaticae
| Nomen Producti | Modellum | PN |
| Modulus Viae Aquaticae lateris robotici | QCWM-04R1 | 7.Y02071 |
| Modulus aquae lateris pinzae | QCWM-04G1 | 7.Y02072 |
Negotium Nostrum


Categoriae productorum
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGI –...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-C6...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-10...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES RGD –...