Prehensor Roboticus Electricus Duorum Digitorum Parallelus cum Roboto Industriali Sex Axium et Collaborativo ad Pilendum et Ponendum
Prehensor Roboticus Electricus Duorum Digitorum Parallelus cum Roboto Industriali Sex Axium et Collaborativo ad Pilendum et Ponendum
Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Libenter novissimam nostram innovationem in robotica industriali praesentamus - bracchium roboticum industriale automaticum. Haec machina dynamica et versatilis destinata est ad industrias revolutionandas, inter quas sunt tractatio, involucrum, collectio mercium et soldadura. Cum suis facultatibus provectis et functione praestanti, bracchia robotica industrialia automata futurum automationis denuo definient.
Cum necessitas efficientiae et productivitatis crescat, negotia perpetuo quaerunt solutiones ad operationes rationalizandas. Hic est ubi brachia robotica industrialia automata interveniunt. Motu suo accurato et celeritate maxima, amplam varietatem materiarum et productorum sine labore tractare possunt, processum productionis continuum curantes.
Inter praecipuas proprietates bracchiorum nostrorum roboticorum industrialium automatorum est facultas eorum ad res efficaciter tractandas et convasandas. Programmate callido et technologia prehensionis novissima, res fragiles perite tractat, convasationem tutam et accuratam curans. Hoc periculum damni inter tractationem et convasationem eliminat, denique tempus et pecuniam pretiosam negotiis conservans.
Praeterea, brachia robotica industrialia automata facultatibus collectionis provectis instructa sunt. Celeriter et accurate res ex variis taeniis transportatoriis vel unitatibus repositionis colligere possunt. Hoc necessitatem laboris manualis tollit et periculum errorum vel accidentium insigniter minuit. Systemate visionis accurato et instrumentis prehensionis versatilibus, brachium roboticum varias formas et magnitudines tractare potest, ita ut aptum sit ad amplam industriarum varietatem.
Praeterea, bracchia nostra robotica industrialia automata officia sudurae accurata perficere possunt. In lineam productionis existentem vel in stationem laboris separatam integrari possunt ad operationes sudurae altae qualitatis perficiendas. Motu constanti et accurato, suturas perfectas praestat, quo fit ut qualitas producti altior et vitia pauciora sint. Hoc ea aptissima reddit industriis ut autocinetica et aëronautica, quae operationes sudurae complexas requirunt.
Concludendo, bracchium roboticum industriale automaticum res novas in campo automationis affert. Eius facultates superiores in tractando, convasando, colligendo et conglutinando id instrumentum multiusus indispensabile negotiis in variis industriis faciunt. Technologia sua recentissima et proprietatibus provectis, efficientiam auctam, productivitatem auctam et qualitatem producti emendatam praestat. Ante competitionem mane et futurum automationis cum nostris bracchiis roboticis industrialibus automatis amplectere.
Applicatio
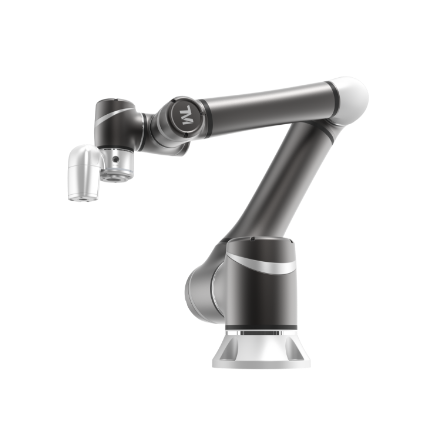
TM14 ad maiora opera destinata est, magna cum praecisione et fidelitate. Cum facultate onera usque ad 14kg ferendi, praecipue utilis est ad portanda instrumenta gravia in extremo brachii et ad opera multo efficaciora reddenda per tempus cycli minuendum. TM14 ad opera difficilia et repetitiva fabricata est, et summam securitatem praebet cum sensoribus intelligentibus qui robotem statim sistunt si contactus detegitur, prohibentes ullam iniuriam et homini et machinae.
Systemate visionis praestantissimo, technologia intellegentiae artificialis provecta, securitate completa, et usu facili, AI Cobot negotium tuum longius quam umquam evehet. Automationem ad gradum superiorem evehe productivitatem augendo, qualitatem emendando, et sumptus reducendo.
Praesentamus robotum electricum cum prehensione robotica, duorum digitorum parallelorum sex axium, ad res colligendas et collocandas. Hoc productum novum industriam roboticae industrialis et collaborativae transformabit propter suas proprietates novissimas et functiones provectas.
Prehensores robotici ad operationes tollendi et collocandi faciles et expeditas praebendas designantur, ita ut industriis ut fabricatione, horreis et logisticis apti sint. Designatio duorum digitorum parallelorum prehensionem auctam praebet, firmam tenacitatem rerum variarum formarum et magnitudinum curans. Robotem collaborativum industrialem sex axium praebens, productum flexibilitatem et adaptabilitatem incomparabilem praebet, permittens ei ut opera complexa cum praecisione perficiat.
Una ex praecipuis proprietatibus prensorum roboticorum est facultas earum collaborativa. Hoc significat eos cum operariis humanis sine intermissione operari posse ad augendam productivitatem et efficientiam in loco laboris. Prensor instructus est novissimis instrumentis salutis, inter quos sensores vis et momenti, ad operationem tutam et fidam in ambitus collaborativis curandam. Hoc eum reddit commodum pretiosum negotiis quae collaborationem harmoniosam inter homines et machinas assequi student.
Praeterea, machina robotica ad prehendendum facile utendum est. Interfacie intuitiva et programmate programmandi facili usu, usores instrumentum celeriter constituere et configurare possunt ut suis requisitis specificis satisfaciat. Instrumentum etiam varia protocolla communicationis sustinet et cum systematibus et apparatu existentibus sine difficultate integrari potest.
Praeterea, productum condiciones asperas ambituum industrialium tolerare potest. Eius constructio robusta et designatio robusta firmitatem et diuturnitatem praestant, tempus inoperabile et sumptus sustentationis minuentes. Insuper, fibula facile aptatur et cum accessionibus et componentibus additis ad usus specificos aptandos aptari potest.
Summa summarum, Roboticus Collaborativus Industrialis cum Prehensione Motorizata, Duobus Digitis Parallelis, Sex Axibus, ad "Pick and Place" (Excipiendum et Ponendum), res novas in agro roboticae affert. Eius proprietates innovativae, facultates collaborationis, et interfacies facilis usui eum solutionem idealem faciunt negotiis quae productivitatem et efficientiam augere volunt. Amplectere futurum roboticae hoc producto exceptionali.
Proprietates
CALLIDIUS
Cobot Tuum per Intellegentiam Artificialem (IA) in Futurum Tutum Praepara
• Inspectio optica automatica (AOI)
• Qualitatis cura et constantia
• Efficientiam productionis auge
• Sumptus operandi minuere
SIMPLEX
Nulla experientia requiritur
• Interfacies graphica ad facilem programmandi usum
• Ordo operis emendationis ad processum ordinatus
• Manus simplex ducens ad positiones docendas
• Calibratio visualis celeris cum tabula calibrationis
TUTUS
Salus collaborativa nostra prioritas est.
• Congruit cum ISO 10218-1:2011 et ISO/TS 15066:2016
• Detectio collisionis cum sistendo in casu necessitatis
• Sumptus et spatium pro saepis et saepimentis serva.
• Limites celeritatis in spatio laboris collaborativo constitue.
Cobots, qui intellegentia artificiali utuntur, praesentiam et orientationem ambitus sui et partium agnoscunt, ut inspectiones visuales et dynamica opera "pick-and-place" perficiant. Intellegentiam artificialem ad lineam productionis sine labore adhibe et productivitatem auge, sumptus minue, et tempora cycli brevia. Visio intellegentiae artificialis etiam eventus e machinis vel instrumentis probationis legere et decisiones congruas proinde facere potest.
Praeter emendationem processuum automationis, robot collaborativus ab intelligentia artificiali ductus notitias in productione vestigare, resolvere et integrare potest, ut vitia vitet et qualitatem producti augeat. Automationem officinae tuae facile auge cum apparatu completo technologiae intelligentiae artificialis.
Nostri roboti collaborativi systemate visionis integrato instructi sunt, quod robotis collaborativis facultatem praebet circumstantias suas percipiendi, quod facultates robotorum collaborativorum insigniter auget. Visio robotica, sive facultas "videndi" et interpretandi data visualia in mandata mandatorum, una est ex proprietatibus quae nos superiores reddit. Res ipsas mutat ad accurate peragenda officia in spatiis laboris dynamicis et mutantibus, operationes faciliores reddendo, et processus automationis efficaciores reddendo.
Utentibus novis destinatum, scientia programmandi non est necessaria ad incipiendum cum AI Cobot. Motus intuitivus "clicca et trahe" utens programmate nostro programmandi fluxus complexitatem minuit. Nostra technologia patentata operatoribus sine experientia programmandi permittit ut proiectum tam breve quam quinque minutas programent.
Sensoria securitatis insita robotem AI Cobot sistent cum contactus physicus detegitur, damnum potentiale minuentes pro ambitu sine pressione et tuto. Etiam limites celeritatis pro roboto constituere potes ut in variis condicionibus iuxta operarios tuos adhiberi possit.
Producta Similia



Specificatio Parameter
| Modellum | TM14 | |
| Pondus | 32.5 kg | |
| Onus Maximum | Quattuordecim chiliogrammata | |
| Attingere | 1100mm | |
| Intervallum Articulorum | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±163° | |
| Celeritas | J1, J2 | 120°/s |
| J3 | CLXXX°/secunda | |
| J4 | 150°/s | |
| J5 | 150°/s | |
| J6 | CLXXX°/secunda | |
| Celeritas Typica | 1.1m/s | |
| Celeritas Maxima | 4m/s | |
| Repetibilitas | ± 0.1mm | |
| Gradus libertatis | Sex articulationes rotationis | |
| Introitus/Egressus | Arca moderatrix | Ingressus digitalis: 16 Egressus digitalis: 16 Ingressus analogus: 2 Exitus analogus: 1 |
| Instrumentum Conn. | Ingressus digitalis: 4 Egressus digitalis: 4 Ingressus analogus: 1 Exitus analogus: 0 | |
| Fons Potentiae I/O | 24V 2.0A pro arca moderatrice et 24V 1.5A pro instrumento | |
| Classificatio IP | IP54 (Bracchium Roboticum); IP32 (Arca Moderatoria) | |
| Consumptio Energiae | Typica 300 vatta | |
| Temperatura | Automatum in intervallo temperaturae 0-50℃ operari potest. | |
| Munditia | Classis ISO 3 | |
| Fons Potentiae | 100-240 VAC, 50-60 Hz | |
| Interfacies I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Communicatio | RS232, Ethemet, Modbus TCP/RTU (dominus et servus), PROFINET (Optionale), EtherNet/IP (Optionale) | |
| Ambitus Programmandi | TMflow, in diagrammate fluxus fundatum | |
| Certificatio | CE, SEMI S2 (Optio) | |
| Intellegentia Artificialis et Visio*(1) | ||
| Functio Intellegentiae Artificialis | Classificatio, Detectio Obiectorum, Segmentatio, Detectio Anomaliae, OCR Intelligentiae Artificialis | |
| Applicatio | Positio, Lectio Codicis Striati 1D/2D, OCR, Detectio Vitiorum, Mensura, Inspectio Coniunctionis | |
| Accuratio Positionis | Positio bidimensionalis: 0.1mm*(II) | |
| Oculus in Manu (Inclusus) | Camera colorata automatice focalizata cum resolutione 5M, distantia operativa 100mm ~ ∞ | |
| Oculus ad Manus (Optionale) | Sustinet maximam duas cameras GigE 2D vel unam cameram GigE 2D + unam cameram 3D*(3) | |
| *(1)Brachia robotica visionis inclusae TM12X, TM14X, TM16X, TM20X etiam non praesto sunt. *(2)Data in hac tabula a laboratorio TM mensurata sunt et distantia operandi est 100 mm. Notandum est in applicationibus practicis valores pertinentes differre posse ob factores ut fontem lucis ambientis in situ, proprietates obiecti, et modos programmandi visionis qui mutationem in accuratione afficient. *(3)Vide locum interretialem officialem TM Plug & Play pro exemplaribus camerarum cum TM Robot congruentibus. | ||
Negotium Nostrum


Categoriae productorum
-

Bracchium Roboticum Longum Exercitus Telescopicum Manipulator 20...
-

Pretium Bracchii Robotici Saldaturae Industrialis Dof Sex Axium W...
-

Automata Industrialia Sex Axium Collaborativa...
-

Fabricatores Robotarum Cooperativarum Educationis Provecti 4, 5, 6 Gradus Liberi...
-

Usus Industrialis Palletizationis Stratificatio Saccorum Arcae Imple...
-
Bracchium roboticum sex axium industriale automaticum soldadurae...