SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-ECG-10 Pressa Electrica Trium Digitorum




Categoria Primaria
Bracchium roboticum industriale / Bracchium roboticum collaborativum / Prehensor electricus / Actuator intelligens / Solutiones automationis
Applicatio

Characteristica

·Detectio casus clampis, functio areae output
·Vis, positio, celeritas moderabilis, accurata gubernatio per Modbus
·Prehensor centralis trium digitorum
·Moderator inclusus: vestigium parvum, integratio facilis
·Modus moderandi: 485 (Modbus RTU), I/O
Prehensor Electricus Tridigitalis Facile ad Obiecta Cylindrica Prehendenda
Alta Efficacia
Vis Prehensionis: 3-10N,
Alta Energiae Densitas
Accuratio ad Imperium
Per Modbus regi potest.
Sapiens ad Responsionem
Functionem habet pro detectione casus premendi (pf) in exitu regionali.
Moderator Incorporatus
Spatium parvum tegens, facile integrandum.
Modi Multi-Imperii
Sustentatio 485 (Modbus) I/O
Prehensor Trium Digitorum
Tribus digitis ad prehendendum, aptum variis occasionibus




Specificatio Parameter
| Numerus exemplaris Z-ECG-10 | Parametri |
| Summa ictus | 10mm |
| Vis prehensionis | 3-10N |
| Repetibilitas | ±0.03mm |
| Pondus prehensionis commendatum | Maximum 0.2kg |
| Transmissio modus | Crema et Pinio + Dux Sphaericus |
| Refectio unguenti partium mobilium | Quisque sex menses vel uno milione motuum / tempore |
| Tempus motus ictus unidirectionalis | 0.3s |
| Ambitus temperaturae operativae | 5-55℃ |
| Ambitus humiditatis operandi | RH35-80()Nulla pruina() |
| Verberatio nigra | Latus singulare: 0.2mm |
| Moderatio ictus | Adaptabilis |
| Adaptatio vis premendi | Adaptabilis |
| Pondus | 0.5kg |
| Dimensiones()L*L*A() | 73*73*95.5mm |
| Gradus Protectionis | IP20 |
| Typus motoris | Motor electricus servo |
| Current Maximus | 0.6A |
| Tensio aestimata | 24V ±10% |
| Currens subsidiarius | 0.3A |
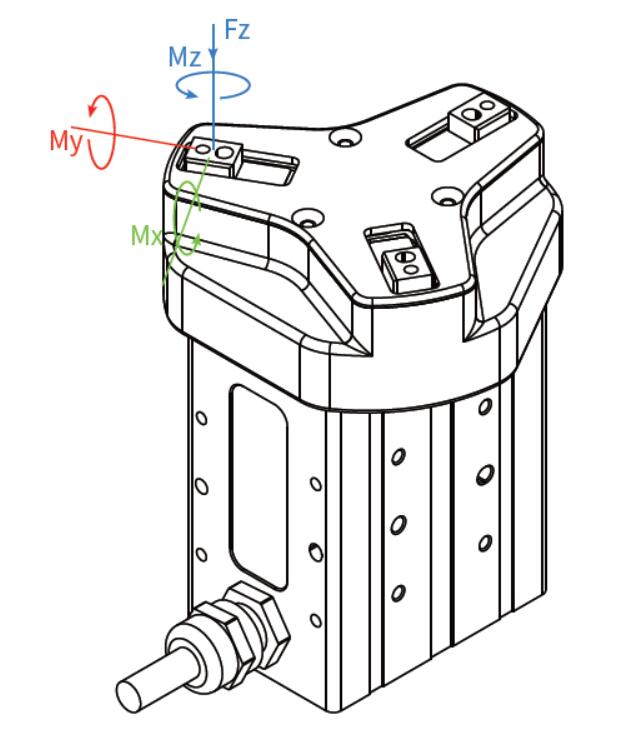
| Onus staticum permissum in directione verticali | |
| Ex: | 70N |
| Momentum torquens permissum | |
| Mx: | 0.64 nm |
| Meum/Mea: | 0.4 nm |
| Mz: | 0.48 Nm |
Accuratio Positionis, Prehensor Trium Digitorum
Prehensor electricus trium digitorum Z-ECG-10, cuius repetibilitas est ±0.03mm, trium digitorum usus est ad prehendendum, et functionem habet detegendi casum prehendendi, exitum regionalem, quae melius ad prehendenda obiecta cylindrica esse potest.


Moderator Incorporatus, Alta Integratio
Magna praesidium contra onera excessiva instantanea, ut ne systema pinzae electricae sistantur aut alias condiciones abnormales habeant. Regulator inclusus est, vis, frenus et celeritas regi possunt, spatium laboris parvum tegit, facile integratur.
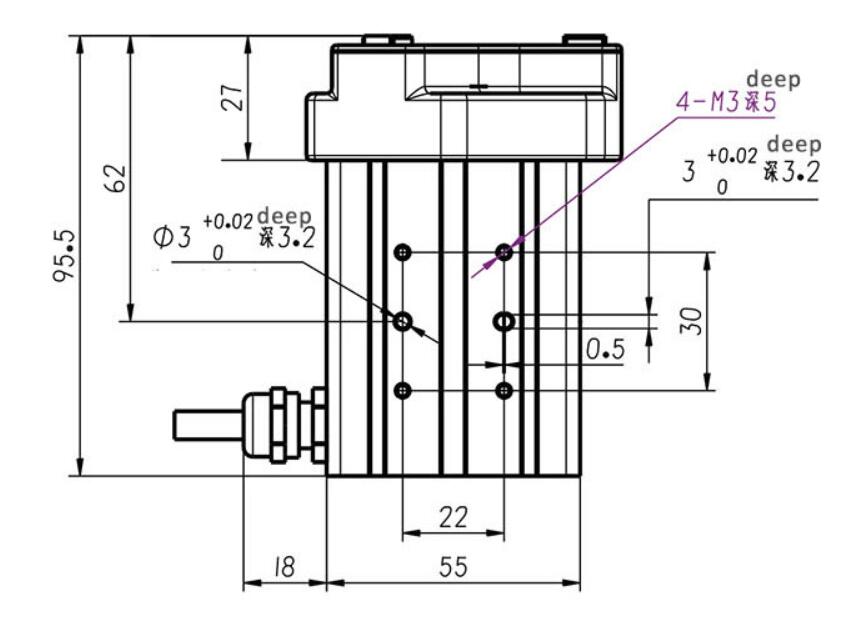
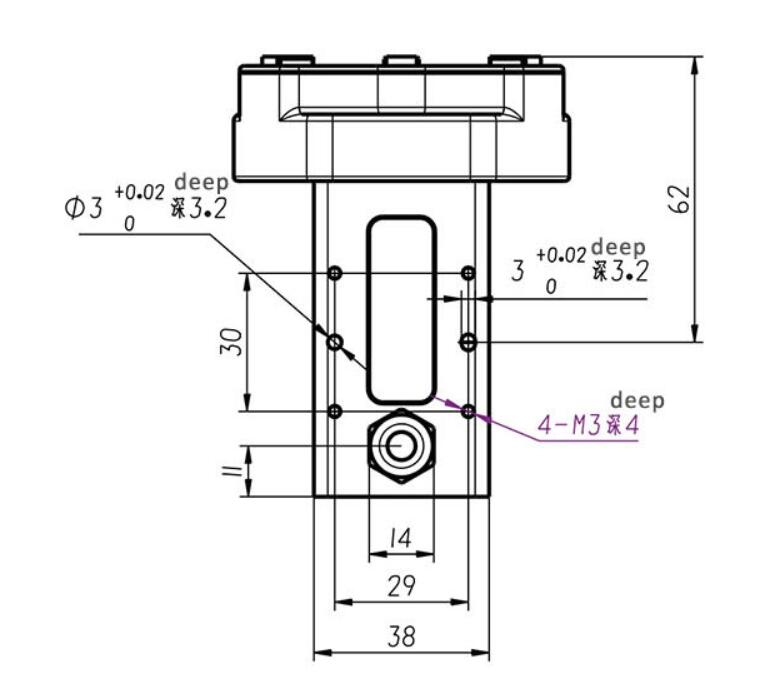
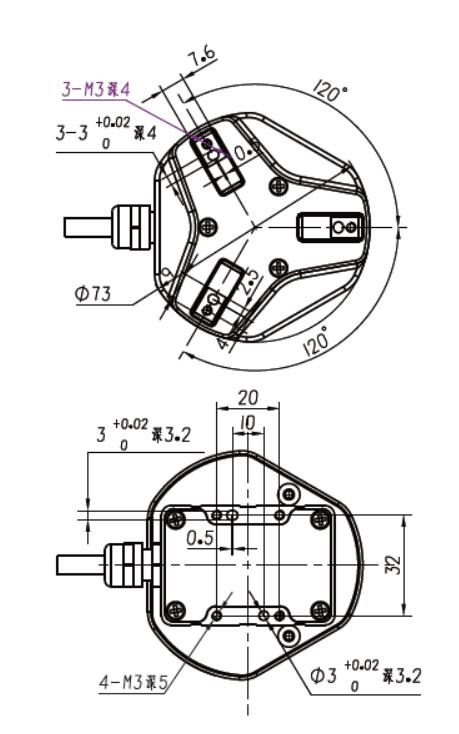
Figura Parva, Flexibilis ad Installandum

Z-ECG-10 transmissionem cum cremagliera et pinione + ductore lineari adhibet; magnitudo eius est L73*W73*H109, pondus tantum 0.65kg, structura compacta, multiplices installationis modos sustinens, et facile multa officia prehensionis perficiens.


Celeritas ad Reagendum, Accuratio Vis Imperium
Brevissimus ictus singularis est 0.3s, vis prehensionis est 3-10N, ictus prehensionis est 10mm, pondus est circiter 0.2kg, quod magnam praecisionem ad premendam efficere potest.
Modi Moderationis Multiplicati, Facile Operandum

Z-ECG-10 per Modbus accurate regi potest, facile assignatur, et ad communicationem Digital I/O utendum, uno tantum filo opus est ad connexionem ON/OFF, et etiam cum systemate moderationis principali PLC compatibilis est.

Centrum Gravitatis Oneris Aberrans
Negotium Nostrum


Categoriae productorum
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-26 Paral...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGC –...
-

SERIES PRESSORIUM ELECTRICORUM HITBOT – Z-EFG-FS Colla...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-20 Paral...
-

DH ROBOTICS SERVO ELECTRICA PRESSIO SERIES PGE –...